Русские Хакеры – Фронту,
Инструкция для операторов дронов с «1001,» версией прошивки
для Mavic3, Mavic3 Classic, Mavic3Pro от русских хакеров
В дроне прошита «1001,» версия прошивки. Это позволяет использовать дрон обходя некоторые ограничения, заложенные в
него заводом-изготовителем.
Изменения в прошивке:
- отключен DRONE ID и OpenDroneId;
- отключены NFZ;
- добавлен режим «Антиспуфинг, быстрый взлёт без GPS»;
- активирован FCC на самом дроне (дополнительно используется частота 5,8 ГГц и большая мощность передачи данных - увеличивается
дальность связи с дроном);
- удалены все ограничения (дальность, высота и т.д.) если вход в аккаунт приложения DJI FLYне выполнен;
- лимит по дальности установлен «без ограничений», а максимальная высота по умолчанию 10 км в независимости от местоположения на
карте (даже в зонах с ограничениями высоты);
- выключена система Airsense;
- добавлена возможность снижения при заслоненном нижнем сонаре;
- заблокирована возможность перепрошивки на заводскую версию;
Дополнительно с 34 версии:
- добавлена возможность автоматического взлёта дрона на 2000, 1000, 500, 300, 200 или 100 метров вверх при потере связи с пультом.
Это позволяет уйти из-под РЭБ (антидронового ружья), из-за которого и теряется связь;
- включен режим «посадка в руку»: дрон при посадке не отскакивает от руки, потому что выключена «умная посадка»;
- добавлена возможность управления режимом отключения автопосадки при полном разряде аккумулятора: дрон не будет автоматически
пытаться сесть на последних процентах батареи;
Дополнительно с 36 версии:
- удалена функция записи и хранения полетов – из дрона нельзя извлечь траектории полетов (кроме 3Pro);
- отключен функционал OpenDroneID – функция, рассылающая данные о дроне через WiFi;
- добавлены команды «fcc_on,», «fcc_off,» - для возможности принудительного включения\отключения FCC (отключение необходимо для
дронов у которых установлены усилители – что бы работать только на 2,4ГГц);
- что бы при нахождении в NFZ на пульте не появлялось предупреждения - исправлена отсылаемая в NFZ служебная информация с дрона
на пульт;
Дополнительно с 45 версии:
- добавлена команда «lost_compass,» - возврат дрона по компасу при потере связи с пультом: дрон поворачивается по компасу в сторону
откуда он прилетел (направление в котором дрон летел после набора высоты в 50 метров – 30 секунд), и самостоятельно начинает лететь
назад(этот режим не работает в ATTI, вместо него отрабатывает обычный «lost_XXX»;);
- дрон всегда включается в режиме «gps_off,» – (не зависит от положения выключателя на пульте);
- добавлена возможность использовать неродные батареи емкостью более 6300 мАч – убрана соответствующая проверка и ограничение;
- только для Mavic3: добавлено принудительное отключение вещания Drone ID через WiFi (OpenDroneId);
- только для MatriceM30: Улучшена защита от спуфинга в режиме без GPS – переписан код, отвечающий за обнуление координат от RTK;
- теперь при правильном вводе 1001-команды в окне «Название»(Name) дрона появится сообщение «ок,» - вместо самой команды;
Дополнительно с 53 версии:
- Добавлена команда «bad_battery,» позволяющая запускать двигатели дрона с любой АКБ или же с любым источником питания (даже при
отсутствии штатной АКБ в дроне), обнуляя ошибки батареи. Команда должна помочь в создании АКБ для долгих полетов. !Но если батарея плохая -
то дрон может упасть!;
- Добавлена команда «wind_atti,» позволяющая при достижении красного значения ветра сразу же принудительно переключать дрон в АТТИ
на 8 секунд - позволяя предотвратить потерю высоты;
- Добавлена команда «fcc_default,» к существующим командам «fcc_on,», «fcc_off,», позволяющая полностью отключить вмешательство в
работу радиотракта со стороны 1001,-прошивки;
- Переделана команда «tof_off,» - теперь она не только игнорирует показания нижнего сонара, но и выключает его ИК-подсветку.
Некоторые эти изменения можно «включить» или «выключить» вводя команду в поле «Название» в окне «Информация»
настроек приложения DJI FLY (если закрыть-открыть меню то при правильном вводе 1001-команды появится сообщение «ок,» - вместо самой команды):
1
t.me/RussianHackersChannel - Telegram канал для скачивания инструкций и новостей про наши новые разработки
версия 25.04.2025
Русские Хакеры – Фронту,
Дрон может летать «без GPS» и «с GPS»:
В прошивке «1001,» добавлена возможность полёта с полным игнорированием данных
от GPS-модуля («Антиспуфинг, быстрый взлёт без GPS»), с принудительно заданными
координатами (0; 0). В этом режиме в пиктограмме количества спутников отображается
белый НОЛЬ.
Переключение между режимами «без GPS» и «с GPS» можно произвести либо центральным
переключателем «CINE»/«NORMAL» либо командой «gps_on,» / «gps_off,».
Режим «без GPS»
«Антиспуфинг, быстрый взлёт без GPS» (положение переключателя «CINE» или команда «gps_off,») -
позволяет быстро взлетать и летать без GPS сигналов от спутников, выполняя полёт только визуально по
камере. В этом режиме недоступно все, что основано на GPS: весь полёт координаты местоположения дрона
статичные (0; 0), на карте трек не рисуется, дистанция не отображается, не работает возвращение в
Домашнюю Точку (Home Point) и полёт по заданным на карте точкам.
В этом режиме дрон становится не подвержен атаке GPS-спуфинга (подмене координат, т.е. «угону»).
Если РЭБ подделывает сигнал от GPS спутников:
• сдвигает в аэропорт;
• меняет текущее местоположение;
• меняет высоту или скорость движения,
то дрон никак на это не реагирует – он не видит реальные данные от GPS.
В этом режиме позиционирование и стабилизацию дрон выполняет только по нижним датчикам, не
используя GPS, поэтому чем выше высота полёта – тем хуже он будет держать себя и сноситься ветром.
Зачастую на высотах более 200 метров он будет переходить в ATTI режим – зависит от поверхности снизу.
Также, находясь в данном режиме можно летать в SPORT-режиме, для этого нужно ввести команду
«cine_sport,». Это позволит лететь с большей скоростью, углами наклона и игнорированием препятствий.
Для переключения в нормальный режим полёта (но по-прежнему без спутников) нужно ввести команду
«cine_normal,».
Русские Хакеры – Фронту,
Режим «с GPS»
«Заводской режим с позиционированием по GPS» (положение переключателя «NORMAL», «SPORT» или
команда «gps_on,») - штатный полёт с использованием координат GPS спутников. Отображаются корректные
координаты и трек полёта дрона, работает возврат в Домашнюю Точку (Home Point).
В этом режиме дрон может быть уязвим для GPS-спуфинга (подмены координат), т.е. его могут
«угнать». В отличии от заводской в «1001,» высота жестко прибита к барометру, то есть к спуфингу высоты
дрон невосприимчив.
Также, находясь в данном режиме можно летать в SPORT-режиме, для этого нужно перевести
центральный переключатель в «SPORT». Это позволит лететь с большей скоростью, углами наклона и
игнорированием препятствий. Для переключения в нормальный режим полёта со спутниками нужно снова
вернуть переключатель в положение «NORMAL».
Во время выполнения полёта можно переключать режимы «с GPS» или «без GPS». В режиме «с GPS»
при наличии спутников домашняя точка обновится (либо можно обновить её вручную) и будет доступен
возврат домой.
Режим «без GPS»/ «с GPS» переключается центральным переключателем на пульте. Но при включении дрон
всегда включается в режиме «gps_off,» – (не зависит от положения выключателя на пульте).
Во всех режимах максимальные радиус и высота полёта, выставленные на пульте игнорируются и
дрон ведет себя так, как если бы на пульте задано "без ограничений".
Ограничение по высоте полёта по умолчанию выставлено в 10 км (установить 1 км можно командой
«up1000,»).
Положение центрального переключателя в «CINE» переопределено - фактически он включает режим
NORMAL+ «gps_off,». Если нужно SPORT+ «gps_off,», то дополнительно нужно ввести команду «cine_sport,».
Поведение дрона при потере связи с пультом: полет «назад по компасу» либо автоматический взлёт вверх
Добавлена возможность автоматического возврата по компасу «назад» или взлёта дрона на высоты
2000, 1000, 500, 300, 200 или 100 метров при потере связи с пультом. Это позволяет уйти из-под РЭБ
(антидронового ружья), из-за которого и теряется связь с пультом. Эти функции включаются командами
«lost_compass,», «lost_2000,», «lost_1000,», «lost_500,», «lost_300,», «lost_200,», «lost_100,» соответственно
и действует только при режиме «Зависание» («Hover») в настройке меню «Потеря сигнала» («Signal Lost»).
Состояние команды запоминается после перезагрузки дрона.
При команде «lost_compass,» дрон при потере связи с пультом поворачивается по компасу в сторону
откуда он прилетел (направление в котором дрон летел первые 30 секунд после набора высоты в 50 метров),
и самостоятельно начинает лететь назад, набрав предварительно высоту в 150 метров (если он ниже 150м,
если выше – то на этой же высоте сразу). Этот режим не работает в ATTI, вместо него отрабатывает
«lost_XXX»(введенный до команды «lost_compass,» - он также запоминается).
Как происходит запись направления для полета «назад» командой «lost_compass,»: когда дрон после взлета
преодолел 50 метровую высоту – запускается процесс записи направления, который длится 30 секунд. В этот момент
на экране пульта спутники начинают отсчитывать 30 секунд (30-29-28-…-3-2-1) – это сделано для наглядности
отсчета оператором. В это время нужно лететь строго в сторону БЗ (при этом направление записывается вдоль
продольной оси корпуса дрона). Также для процесса «записи» дрон должен двигаться (иметь скорость), а не «висеть»
- запись только при движении, если скорость нулевая – направление не учитывается. После завершения отсчета дрон
запомнит усредненное направление «назад» по компасу, которое было в течение этих 30 секунд и по которому он
будет возвращаться в случае потери связи (в течение текущего полета - до выключения моторов).
При команде «lost_compass,» дрон использует только компас, и ориентируется только по «азимуту»,
(не используя GPS), поэтому важно не ожидать от него поведения аналогичного режиму RTH (основанном на
GPS) – он не вернется в точку взлета, а лишь полетит в направлении, обратном записанному вначале. Время
обратного полета равно общему времени текущего полета (с момента включения моторов).
Русские Хакеры – Фронту,
Дрон самостоятельно летит до восстановления связи с пультом (и еще через 6 секунд восстановится
управление стиками). При восстановлении управления дрон начнет возвращаться на ту высоту, которая была
в момент потери связи, то есть ВНИЗ. Для восстановления управления и остановки движения дрона вниз
необходимо нажать стик «ВВЕРХ» - перехватив управление.
Для выключения возможности автоматического взлёта вверх\назад при потере связи с пультом
(чтобы дрон просто «зависал» при потере сигнала) нужно ввести команду «lost_off,».
Команда «lost_compass,» активирована сразу же, по умолчанию - при прошивке(а до него вводится lost_500,).
Возможность остановить потерю высоты дрона при сильном боковом ветре
Существует редко проявляющаяся проблема при использовании «1001,»-прошивки в режиме «без GPS»
(особенно на моделях 3Т\Е) – дрон ошибочно видит сильный боковой ветер и начинает ему сопротивляться
– улетая вбок и теряя высоту. Эта компенсация ветру происходит автоматически и практически не
компенсируется стиками пульта.
Для решения этой проблемы создана команда «wind_atti,» - после ее ввода дрон, при достижении красного
значения ветра (для Mavic3 - выше 16м\с), сразу же принудительно переключается в АТТИ на 8 секунд.
Это отключает самостоятельный полет дрона и дает возможность оператору вырулить вручную – вернув
ему управление.
Данная команда вводится при каждом включении дрона (не сохраняется после перезагрузки!)
Возможность запуска двигателей дрона с любой АКБ или же с любым источником питания
(обнуление ошибок батареи)
Команда «bad_battery,» дает возможность запускать двигатели при наличии питания на дроне (даже при
отсутствии штатной АКБ в дроне): с любой АКБ или же с любым источником питания соответствующего
напряжения (фактически команда обнуляет ошибки, связанные с батареей). Можно летать с батареей
любого объема\производителя и даже на проводе с земли.
ВНИМАНИЕ! Команда «bad_battery,» НЕ ЧИНИТ батареи! Если батарея плохая - то дрон может упасть!
Команда «bad_battery,» вводится при каждом включении дрона (не сохраняется после перезагрузки!) и в
пиктограмме количества спутников периодически отображается число «88» — это индикатор того, что
дрон игнорирует ошибки батареи. «88» выбрано для наглядности, это сокращение от «Bad_Battery,» -
первые две буквы этой команды - BB. Эта индикация напоминает пилоту, что дрон летит с неродной
батареей и в этом случае вся ответственность за контролем параметров батареи – на нем (ведь батарея
– «основа» дрона для нахождения в воздухе).
Технические подробности по использованию команды – см Приложение «ЗАМЕЧАНИЯ по использованию
команды «bad_battery,»»
Примечания
1) Каждая команда заканчивается «запятой», не забывайте про это при вводе;
2) Чтобы не запутаться рекомендуется выполнять весь полёт в одном режиме: либо «без GPS»,
либо «с GPS»;
3) Если полёт начался в режиме «без GPS», то при переключении в режим «с GPS» дрон снова
становится уязвим для GPS-спуфинга;
4) Если в полёте по GPS началось странное поведение дрона, то лучше сразу перейти в режим
«Антиспуфинг, быстрый взлёт без GPS» (положение переключателя «CINE» или команда «gps_off,»);
5) Если в полёте в режиме «Антиспуфинг, быстрый взлёт без GPS» («CINE» или «gps_off,») был ещё
и режим ATTI, то при переключении в «GPS» («NORMAL» или «gps_on,») можно увидеть "ошибку полётного
контроллера". Данная ошибка не мешает текущему полёту;
6) Для выхода из ATTI режима рекомендуется снизить высоту(менее 10м), чтобы снова "зацепиться"
за землю нижними камерами;
Русские Хакеры – Фронту,
7) Переключать режим нужно при включенном дроне и включенном пульте. Если при включении пульта
и дрона значение переключателя не соответствует отображаемому на экране режиму в приложении DJI FLY,
то нужно переключиться на пульте в другой режим и через пару секунд вернуть переключатель обратно в
нужное положение. С 45 версии дрон всегда включается в режиме «gps_off,» – не зависимо от положения выключателя на пульте;
8) в последних версиях DJI FLY (например 1.10.6) отсутствует кнопка выбора двухполосного
радиоканала во вкладке «Передача». При включении дрона с активированной командой «fcc_on,» радиообмен
производится в двух диапазонах, если кнопки 2,4 и 5,8 не нажимать. Но если выбрать кнопкой хоть один
из этих диапазонов, то вернуться в двухполосный режим уже не получится без перезагрузки.
9) Если в дроне уже установлен усилитель (бустер) на 2,4 ГГц, то разово нужно ввести команду
«fcc_off,» - что бы дрон использовал только частоту 2,4ГГц. Иначе дрон будет работать в двух частотах,
и при переходе на 5,8ГГц радиотракт будет работать без усилителя. Команда применится после
перезагрузки дрона и пульта;
10) После перезагрузки дрона значения команд «leds_off(on),», «cine_normal(sport),», «lost_X00,»,
«lost_off,», «bat_land_off(on),», «fcc_on(off),» запоминаются, а состояния остальных введённых команд не
сохраняются;
11) Изменять настройки «посадка в руку»\ «Precission Landing» и «Отключение автопосадки при
полном разряде аккумулятора» можно также используя программу DroneHacks;
12) Если 3Т\3Е сваливается в АТТI (в режиме «gps_off,»), проверьте что бы в настройках было
включено «Visual Рositioning»(Визуальное позиционирование).
13) Определить, что дрон прошит на "1001," прошивку можно визуально: в отличие от заводского,
прошитый «1001,» при включении питания в пиктограмме с количеством спутников отсчитывает:
99,88,77,66,55,44,33,22,11. Что бы определить какая именно подверсия «1001,» прошита в дроне можно командой
«version,» - 21, 34, 36, 45, 53 или новее.
Краткое описание команд и изменений приведено в «Памятке оператору дрона Mavic3, Mavic3 Classic,
Mavic3Pro перепрошитого на «1001,» версию»:
Русские Хакеры – Фронту,
Памятка оператору дрона Mavic3 и Mavic3 Classic, Mavic3Pro перепрошитого на «1001,» версию
В дроне зашита «1001,» версия прошивки от русских хакеров со следующими изменениями:
Команда в интерфейсе пульта дрона
Изменение в поле «Название дрона» Описание
Включение Отключение
Дрон не отсылает информацию о себе в аэроскоп: ни свое местоположение, ни
Дрон не виден на аэроскопе - -
точку дом, ни координаты оператора. Можно использовать любую версию DJI FLY и
(DRONE ID отключен)
Iphone.
«Замусоривание» аэроскопов: aeroscope_random, aeroscope_off, Дрон начнет отсылать псевдослучайную информацию в аэроскоп о местоположении
случайных дронов: либо случайные координаты, либо рисовать фигуры в форме Z
вещание поддельных aeroscope_z,
или сердца на экране аэроскопа.
координат дронов через DRONE aeroscope_heart,
При этом дрон не отсылает ни свое истинное местоположение, ни точку дом, ни
ID
координаты оператора – данные генерируются псевдослучайные.
Дрон не будет реагировать на попадание в NFZ (NoFlyZone). Телефон будет
Отключены NFZ - -
показывать, что дрон в NFZ и будет посажен, но это никак не влияет на полёт
самого дрона - нужно спокойно игнорировать эти сообщения.
Добавлен режим полёта «без gps_off, gps_on, Команда «gps_off,» активирует режим «без GPS». При этом полностью
игнорируется принимаемая информация от GPS-модуля, с вечной обманкой что
GPS»:
сигнал от нуля спутников сильный, а координаты всегда (0; 0). Это позволяет
Антиспуфинг, быстрый взлёт
сразу же после включения дрона НЕ ждать спутники, как будто он их сразу поймал,
без GPS
в координатах (0; 0) поставил Home Point и снял все ограничения на взлёт.
При этом пиктограмма спутников с количеством НОЛЬ становится
белой (на андроид-версии приложения).
Также этот режим включается переключателем на пульте в
положении «CINE».
Полёт в этом режиме осуществляется визуально - по камере.
Команда «gps_on,» позволяет летать дрону ориентируясь по GPS. Также этот
режим включается переключателем на пульте в положении «NORMAL». В этом
режиме дрон уязвим для GPS-спуфинга (подмены координат), т.е. его могут
«угнать» РЭБ.
При переключении на пульте переключателя в положение "CINE" («gps_off,») по
Переключение в режим SPORT cine_sport, cine_normal,
умолчанию дрон летает в режиме NORMAL.
при опции «gps_off,»
Если нужно летать быстрее в SPORT+ «gps_off,», то дополнительно нужно ввести
команду «cine_sport,».
Максимальная высота полёта дрона 9999 м (10 км) установлена по умолчанию (или
Максимальная высота полёта up1000, up9999,
задается командой «up9999,»), а командой «up1000,» выставляется в заводское
10км
ограничение 1000 м (1 км). Все остальные ограничения по высоте удалены.
Позволяет принудительно включать\отключать FCC и частоту 5,8ГГц.
Включение и отключение «fcc_on,» «fcc_off,»
При «fcc_on,» дополнительно используется частота 5,8 ГГц и большая мощность
FCC+5,8 ГГц
передачи данных - увеличивается дальность связи с дроном.
Отключение необходимо для дронов которых установлены усилители – что бы
работать только на 2,4ГГц.
Команда «fcc_default,» позволяет полностью отключить вмешательство в работу
радиотракта со стороны 1001,-прошивки.
Удалены ограничения по высоте/дальности в 30/50 метров от места запуска если
Удалены все ограничения - -
НЕ ВОЙТИ в учетную запись в приложении DJI FLY.
(дальность, высота) если вход
в аккаунт в приложении DJI
FLY не выполнен
AirSense — это система, которая позволяет дрону принимать сигналы, посылаемые
Автоматическое отключение - -
самолетами или вертолетами (используя протокол ADS-B), и предупреждает
системы AirSense
пользователя о наличии поблизости пилотируемого самолета или вертолета.
В случае если нижний сонар (не камеры) перекрывается подвесом или грузом – дрон
Отключение нижнего сонара на tof_on, tof_off,
не летит вниз: ни по стикам, ни по команде «посадка». В этом случае команда
случай, если дрон не будет
«tof_off,», принудительно выключит его и позволит дрону лететь вниз. Так же
снижаться из-за того, что он
выключается ИК-подсветка сонара. В этом режиме нужно садиться вручную –
будет заслонен подвесом или
штатная система не видит препятствий снизу.
грузом
Отключение бортовых огней leds_on, leds_off, Светодиоды на лучах дрона включаются командой «leds_on,» и выключаются
командой «leds_off,».
Нельзя перепрошить заводскую версию прошивки поверх «1001,», тем самым удалив
Невозможность перепрошивки - -
внесенные в нее изменения, потому что ARB=1001.
Из дрона нельзя извлечь траектории его полетов, включая точку ДОМ.
Невозможность снятия логов - -
полета
Дрон не будет автоматически пытаться сесть на последних процентах батареи.
Отключение автопосадки при bat_land_off, bat_land_on,
После команды «bat_land_off,» - будет садиться, при «bat_land_on,» - не будет
полном разряде аккумулятора
садиться.
Дрон автоматически взлетает на высоту 2000, 1000, 500, 300, 200 или 100 метров
При потере связи с пультом – lost_2000, lost_off,
вверх при потере связи с пультом. Эта функция включается командами
дрон автоматически взлетает lost_1000,
«lost_2000,», «lost_1000,», «lost_500,», «lost_300,», «lost_200,», «lost_100,»
вверх на высоту 500 (100, 200, lost_500,
соответственно (в режиме Hover).
300,1000, 2000) метров lost_300,
lost_200,
При команде «lost_compass,» дрон при потере связи с пультом поворачивается по
lost_100,
компасу в сторону откуда он прилетел (направление в котором дрон летел первые
либо полминуты после взлета и набора высоты в 50 метров), и самостоятельно
начинает лететь назад. В ATTI «lost_compass,» не работает, вместо него
улетает назад – по компасу lost_compass,
срабатывает «lost_XXX».
Команда «lost_compass,» уже активирована в дроне по умолчанию – при прошивке.
Состояние данной команды сохраняется даже после перезагрузки дрона.
Возможность запуска двигателей bad_battery, - Дрон будет взлетать с любой батареей\источником питания – принудительно
дрона с любой АКБ или же с любым обнуляются ошибки батареи
источником питания ВНИМАНИЕ! Команда НЕ ЧИНИТ батареи! Если батарея плохая - то дрон упадет!
wind_atti, wind_normal,
При достижении красного значения Если дрон ошибочно видит сильный боковой ветер и начинает ему сопротивляться –
ветра дрон сразу же принудительно улетая вбок и теряя высоту, то при достижении красного значения ветра дрон сразу
переключается в АТТИ на 8 секунд же принудительно переключается в АТТИ на 8 секунд — это дает возможность
остановить потерю высоты.
Русские Хакеры – Фронту,
ПРИЛОЖЕНИЕ
ЗАМЕЧАНИЯ по использованию команды «bad_battery,»
1.Используйте данную команду с осознанным подходом – просчитав энергетику (объем, заряд, потребление,
ветер) и примерное время полета иначе можно потерять дрон.
2. Команда «bad_battery,» позволяет снять ограничения при использовании неродных и увеличенных
батарей, но при этом появляется возможность использования ПЛОХИХ батарей. Помните, что дрон то
взлетит, но команда НЕ ЧИНИТ плохие батареи! С плохой батареей – дрон может упасть.
3.Отметим, что с неродной АКБ нельзя полностью верить штатным показаниям о состоянии батареи
(оставшийся процент заряда и времени полета) – ведь они рассчитываются корректно только для штатной
АКБ!
4. Дополнительно напомним, что при перегревах моторов – магниты в них могут размагнититься и
грузоподъемность дрона упадет, это нужно учитывать при создании увеличенных АКБ.
5. Если дрон через несколько секунд после взлета включает автопосадку то дополнительно нужно ввести
команду «bat_land_on,».
6. Если при использовании нештатной АКБ произойдет просадка по питанию (например, в момент подачи
полного газа) то дрон включит аварийную автопосадку с ошибкой из-за низкого напряжения. Это значит,
что эта АКБ не вытягивает по энергетике.
Хотя команда «bad_battery,» позволяет, но !КРАЙНЕ НЕ РЕКОМЕНДУЕТСЯ ЛЕТАТЬ без РОДНОЙ АКБ – БЕЗ
ПОКАЗАНИЙ ОСТАВШЕГОСЯ ЗАРЯДА\ВРЕМЕНИ ПОЛЕТА - ПОТЕРЯЕТЕ ДРОН!
Лучше экспериментировать с дополнительным емкостями, подключенными к родной АКБ – для контроля
уровня разряда.
Технические подробности про подключение внешнего питания (для серии Mavic3):
Напряжение батареи типа 4S используемой в Mavic3: 15-16,5Вольт.
При включении АКБ (кнопкой на ее корпусе) – она начинает подавать питание на крайние контакты(по 3
контакта с каждой стороны) и питание поступает на ESC-плату дрона. Дрон, получив питание, сразу же
включается. Если же подать внешнее питание (от других АКБ, от источника питания и т.д.) сразу на
контакты ESC-платы дрона, то дрон сразу же включается и после ввода команды «bad_battery,»
(обнуляющей ошибки АКБ) может заводить моторы и взлетать.
Контакты разъема АКБ серии Mavic3 Контакты разъема платы ESC серии Mavic3
Инструкция для операторов дронов с «1001,» версией прошивки
для Mavic3, Mavic3 Classic, Mavic3Pro от русских хакеров
В дроне прошита «1001,» версия прошивки. Это позволяет использовать дрон обходя некоторые ограничения, заложенные в
него заводом-изготовителем.
Изменения в прошивке:
- отключен DRONE ID и OpenDroneId;
- отключены NFZ;
- добавлен режим «Антиспуфинг, быстрый взлёт без GPS»;
- активирован FCC на самом дроне (дополнительно используется частота 5,8 ГГц и большая мощность передачи данных - увеличивается
дальность связи с дроном);
- удалены все ограничения (дальность, высота и т.д.) если вход в аккаунт приложения DJI FLYне выполнен;
- лимит по дальности установлен «без ограничений», а максимальная высота по умолчанию 10 км в независимости от местоположения на
карте (даже в зонах с ограничениями высоты);
- выключена система Airsense;
- добавлена возможность снижения при заслоненном нижнем сонаре;
- заблокирована возможность перепрошивки на заводскую версию;
Дополнительно с 34 версии:
- добавлена возможность автоматического взлёта дрона на 2000, 1000, 500, 300, 200 или 100 метров вверх при потере связи с пультом.
Это позволяет уйти из-под РЭБ (антидронового ружья), из-за которого и теряется связь;
- включен режим «посадка в руку»: дрон при посадке не отскакивает от руки, потому что выключена «умная посадка»;
- добавлена возможность управления режимом отключения автопосадки при полном разряде аккумулятора: дрон не будет автоматически
пытаться сесть на последних процентах батареи;
Дополнительно с 36 версии:
- удалена функция записи и хранения полетов – из дрона нельзя извлечь траектории полетов (кроме 3Pro);
- отключен функционал OpenDroneID – функция, рассылающая данные о дроне через WiFi;
- добавлены команды «fcc_on,», «fcc_off,» - для возможности принудительного включения\отключения FCC (отключение необходимо для
дронов у которых установлены усилители – что бы работать только на 2,4ГГц);
- что бы при нахождении в NFZ на пульте не появлялось предупреждения - исправлена отсылаемая в NFZ служебная информация с дрона
на пульт;
Дополнительно с 45 версии:
- добавлена команда «lost_compass,» - возврат дрона по компасу при потере связи с пультом: дрон поворачивается по компасу в сторону
откуда он прилетел (направление в котором дрон летел после набора высоты в 50 метров – 30 секунд), и самостоятельно начинает лететь
назад(этот режим не работает в ATTI, вместо него отрабатывает обычный «lost_XXX»;);
- дрон всегда включается в режиме «gps_off,» – (не зависит от положения выключателя на пульте);
- добавлена возможность использовать неродные батареи емкостью более 6300 мАч – убрана соответствующая проверка и ограничение;
- только для Mavic3: добавлено принудительное отключение вещания Drone ID через WiFi (OpenDroneId);
- только для MatriceM30: Улучшена защита от спуфинга в режиме без GPS – переписан код, отвечающий за обнуление координат от RTK;
- теперь при правильном вводе 1001-команды в окне «Название»(Name) дрона появится сообщение «ок,» - вместо самой команды;
Дополнительно с 53 версии:
- Добавлена команда «bad_battery,» позволяющая запускать двигатели дрона с любой АКБ или же с любым источником питания (даже при
отсутствии штатной АКБ в дроне), обнуляя ошибки батареи. Команда должна помочь в создании АКБ для долгих полетов. !Но если батарея плохая -
то дрон может упасть!;
- Добавлена команда «wind_atti,» позволяющая при достижении красного значения ветра сразу же принудительно переключать дрон в АТТИ
на 8 секунд - позволяя предотвратить потерю высоты;
- Добавлена команда «fcc_default,» к существующим командам «fcc_on,», «fcc_off,», позволяющая полностью отключить вмешательство в
работу радиотракта со стороны 1001,-прошивки;
- Переделана команда «tof_off,» - теперь она не только игнорирует показания нижнего сонара, но и выключает его ИК-подсветку.
Некоторые эти изменения можно «включить» или «выключить» вводя команду в поле «Название» в окне «Информация»
настроек приложения DJI FLY (если закрыть-открыть меню то при правильном вводе 1001-команды появится сообщение «ок,» - вместо самой команды):
1
t.me/RussianHackersChannel - Telegram канал для скачивания инструкций и новостей про наши новые разработки
версия 25.04.2025
Русские Хакеры – Фронту,
Дрон может летать «без GPS» и «с GPS»:
В прошивке «1001,» добавлена возможность полёта с полным игнорированием данных
от GPS-модуля («Антиспуфинг, быстрый взлёт без GPS»), с принудительно заданными
координатами (0; 0). В этом режиме в пиктограмме количества спутников отображается
белый НОЛЬ.
Переключение между режимами «без GPS» и «с GPS» можно произвести либо центральным
переключателем «CINE»/«NORMAL» либо командой «gps_on,» / «gps_off,».
Режим «без GPS»
«Антиспуфинг, быстрый взлёт без GPS» (положение переключателя «CINE» или команда «gps_off,») -
позволяет быстро взлетать и летать без GPS сигналов от спутников, выполняя полёт только визуально по
камере. В этом режиме недоступно все, что основано на GPS: весь полёт координаты местоположения дрона
статичные (0; 0), на карте трек не рисуется, дистанция не отображается, не работает возвращение в
Домашнюю Точку (Home Point) и полёт по заданным на карте точкам.
В этом режиме дрон становится не подвержен атаке GPS-спуфинга (подмене координат, т.е. «угону»).
Если РЭБ подделывает сигнал от GPS спутников:
• сдвигает в аэропорт;
• меняет текущее местоположение;
• меняет высоту или скорость движения,
то дрон никак на это не реагирует – он не видит реальные данные от GPS.
В этом режиме позиционирование и стабилизацию дрон выполняет только по нижним датчикам, не
используя GPS, поэтому чем выше высота полёта – тем хуже он будет держать себя и сноситься ветром.
Зачастую на высотах более 200 метров он будет переходить в ATTI режим – зависит от поверхности снизу.
Также, находясь в данном режиме можно летать в SPORT-режиме, для этого нужно ввести команду
«cine_sport,». Это позволит лететь с большей скоростью, углами наклона и игнорированием препятствий.
Для переключения в нормальный режим полёта (но по-прежнему без спутников) нужно ввести команду
«cine_normal,».
Русские Хакеры – Фронту,
Режим «с GPS»
«Заводской режим с позиционированием по GPS» (положение переключателя «NORMAL», «SPORT» или
команда «gps_on,») - штатный полёт с использованием координат GPS спутников. Отображаются корректные
координаты и трек полёта дрона, работает возврат в Домашнюю Точку (Home Point).
В этом режиме дрон может быть уязвим для GPS-спуфинга (подмены координат), т.е. его могут
«угнать». В отличии от заводской в «1001,» высота жестко прибита к барометру, то есть к спуфингу высоты
дрон невосприимчив.
Также, находясь в данном режиме можно летать в SPORT-режиме, для этого нужно перевести
центральный переключатель в «SPORT». Это позволит лететь с большей скоростью, углами наклона и
игнорированием препятствий. Для переключения в нормальный режим полёта со спутниками нужно снова
вернуть переключатель в положение «NORMAL».
Во время выполнения полёта можно переключать режимы «с GPS» или «без GPS». В режиме «с GPS»
при наличии спутников домашняя точка обновится (либо можно обновить её вручную) и будет доступен
возврат домой.
Режим «без GPS»/ «с GPS» переключается центральным переключателем на пульте. Но при включении дрон
всегда включается в режиме «gps_off,» – (не зависит от положения выключателя на пульте).
Во всех режимах максимальные радиус и высота полёта, выставленные на пульте игнорируются и
дрон ведет себя так, как если бы на пульте задано "без ограничений".
Ограничение по высоте полёта по умолчанию выставлено в 10 км (установить 1 км можно командой
«up1000,»).
Положение центрального переключателя в «CINE» переопределено - фактически он включает режим
NORMAL+ «gps_off,». Если нужно SPORT+ «gps_off,», то дополнительно нужно ввести команду «cine_sport,».
Поведение дрона при потере связи с пультом: полет «назад по компасу» либо автоматический взлёт вверх
Добавлена возможность автоматического возврата по компасу «назад» или взлёта дрона на высоты
2000, 1000, 500, 300, 200 или 100 метров при потере связи с пультом. Это позволяет уйти из-под РЭБ
(антидронового ружья), из-за которого и теряется связь с пультом. Эти функции включаются командами
«lost_compass,», «lost_2000,», «lost_1000,», «lost_500,», «lost_300,», «lost_200,», «lost_100,» соответственно
и действует только при режиме «Зависание» («Hover») в настройке меню «Потеря сигнала» («Signal Lost»).
Состояние команды запоминается после перезагрузки дрона.
При команде «lost_compass,» дрон при потере связи с пультом поворачивается по компасу в сторону
откуда он прилетел (направление в котором дрон летел первые 30 секунд после набора высоты в 50 метров),
и самостоятельно начинает лететь назад, набрав предварительно высоту в 150 метров (если он ниже 150м,
если выше – то на этой же высоте сразу). Этот режим не работает в ATTI, вместо него отрабатывает
«lost_XXX»(введенный до команды «lost_compass,» - он также запоминается).
Как происходит запись направления для полета «назад» командой «lost_compass,»: когда дрон после взлета
преодолел 50 метровую высоту – запускается процесс записи направления, который длится 30 секунд. В этот момент
на экране пульта спутники начинают отсчитывать 30 секунд (30-29-28-…-3-2-1) – это сделано для наглядности
отсчета оператором. В это время нужно лететь строго в сторону БЗ (при этом направление записывается вдоль
продольной оси корпуса дрона). Также для процесса «записи» дрон должен двигаться (иметь скорость), а не «висеть»
- запись только при движении, если скорость нулевая – направление не учитывается. После завершения отсчета дрон
запомнит усредненное направление «назад» по компасу, которое было в течение этих 30 секунд и по которому он
будет возвращаться в случае потери связи (в течение текущего полета - до выключения моторов).
При команде «lost_compass,» дрон использует только компас, и ориентируется только по «азимуту»,
(не используя GPS), поэтому важно не ожидать от него поведения аналогичного режиму RTH (основанном на
GPS) – он не вернется в точку взлета, а лишь полетит в направлении, обратном записанному вначале. Время
обратного полета равно общему времени текущего полета (с момента включения моторов).
Русские Хакеры – Фронту,
Дрон самостоятельно летит до восстановления связи с пультом (и еще через 6 секунд восстановится
управление стиками). При восстановлении управления дрон начнет возвращаться на ту высоту, которая была
в момент потери связи, то есть ВНИЗ. Для восстановления управления и остановки движения дрона вниз
необходимо нажать стик «ВВЕРХ» - перехватив управление.
Для выключения возможности автоматического взлёта вверх\назад при потере связи с пультом
(чтобы дрон просто «зависал» при потере сигнала) нужно ввести команду «lost_off,».
Команда «lost_compass,» активирована сразу же, по умолчанию - при прошивке(а до него вводится lost_500,).
Возможность остановить потерю высоты дрона при сильном боковом ветре
Существует редко проявляющаяся проблема при использовании «1001,»-прошивки в режиме «без GPS»
(особенно на моделях 3Т\Е) – дрон ошибочно видит сильный боковой ветер и начинает ему сопротивляться
– улетая вбок и теряя высоту. Эта компенсация ветру происходит автоматически и практически не
компенсируется стиками пульта.
Для решения этой проблемы создана команда «wind_atti,» - после ее ввода дрон, при достижении красного
значения ветра (для Mavic3 - выше 16м\с), сразу же принудительно переключается в АТТИ на 8 секунд.
Это отключает самостоятельный полет дрона и дает возможность оператору вырулить вручную – вернув
ему управление.
Данная команда вводится при каждом включении дрона (не сохраняется после перезагрузки!)
Возможность запуска двигателей дрона с любой АКБ или же с любым источником питания
(обнуление ошибок батареи)
Команда «bad_battery,» дает возможность запускать двигатели при наличии питания на дроне (даже при
отсутствии штатной АКБ в дроне): с любой АКБ или же с любым источником питания соответствующего
напряжения (фактически команда обнуляет ошибки, связанные с батареей). Можно летать с батареей
любого объема\производителя и даже на проводе с земли.
ВНИМАНИЕ! Команда «bad_battery,» НЕ ЧИНИТ батареи! Если батарея плохая - то дрон может упасть!
Команда «bad_battery,» вводится при каждом включении дрона (не сохраняется после перезагрузки!) и в
пиктограмме количества спутников периодически отображается число «88» — это индикатор того, что
дрон игнорирует ошибки батареи. «88» выбрано для наглядности, это сокращение от «Bad_Battery,» -
первые две буквы этой команды - BB. Эта индикация напоминает пилоту, что дрон летит с неродной
батареей и в этом случае вся ответственность за контролем параметров батареи – на нем (ведь батарея
– «основа» дрона для нахождения в воздухе).
Технические подробности по использованию команды – см Приложение «ЗАМЕЧАНИЯ по использованию
команды «bad_battery,»»
Примечания
1) Каждая команда заканчивается «запятой», не забывайте про это при вводе;
2) Чтобы не запутаться рекомендуется выполнять весь полёт в одном режиме: либо «без GPS»,
либо «с GPS»;
3) Если полёт начался в режиме «без GPS», то при переключении в режим «с GPS» дрон снова
становится уязвим для GPS-спуфинга;
4) Если в полёте по GPS началось странное поведение дрона, то лучше сразу перейти в режим
«Антиспуфинг, быстрый взлёт без GPS» (положение переключателя «CINE» или команда «gps_off,»);
5) Если в полёте в режиме «Антиспуфинг, быстрый взлёт без GPS» («CINE» или «gps_off,») был ещё
и режим ATTI, то при переключении в «GPS» («NORMAL» или «gps_on,») можно увидеть "ошибку полётного
контроллера". Данная ошибка не мешает текущему полёту;
6) Для выхода из ATTI режима рекомендуется снизить высоту(менее 10м), чтобы снова "зацепиться"
за землю нижними камерами;
Русские Хакеры – Фронту,
7) Переключать режим нужно при включенном дроне и включенном пульте. Если при включении пульта
и дрона значение переключателя не соответствует отображаемому на экране режиму в приложении DJI FLY,
то нужно переключиться на пульте в другой режим и через пару секунд вернуть переключатель обратно в
нужное положение. С 45 версии дрон всегда включается в режиме «gps_off,» – не зависимо от положения выключателя на пульте;
8) в последних версиях DJI FLY (например 1.10.6) отсутствует кнопка выбора двухполосного
радиоканала во вкладке «Передача». При включении дрона с активированной командой «fcc_on,» радиообмен
производится в двух диапазонах, если кнопки 2,4 и 5,8 не нажимать. Но если выбрать кнопкой хоть один
из этих диапазонов, то вернуться в двухполосный режим уже не получится без перезагрузки.
9) Если в дроне уже установлен усилитель (бустер) на 2,4 ГГц, то разово нужно ввести команду
«fcc_off,» - что бы дрон использовал только частоту 2,4ГГц. Иначе дрон будет работать в двух частотах,
и при переходе на 5,8ГГц радиотракт будет работать без усилителя. Команда применится после
перезагрузки дрона и пульта;
10) После перезагрузки дрона значения команд «leds_off(on),», «cine_normal(sport),», «lost_X00,»,
«lost_off,», «bat_land_off(on),», «fcc_on(off),» запоминаются, а состояния остальных введённых команд не
сохраняются;
11) Изменять настройки «посадка в руку»\ «Precission Landing» и «Отключение автопосадки при
полном разряде аккумулятора» можно также используя программу DroneHacks;
12) Если 3Т\3Е сваливается в АТТI (в режиме «gps_off,»), проверьте что бы в настройках было
включено «Visual Рositioning»(Визуальное позиционирование).
13) Определить, что дрон прошит на "1001," прошивку можно визуально: в отличие от заводского,
прошитый «1001,» при включении питания в пиктограмме с количеством спутников отсчитывает:
99,88,77,66,55,44,33,22,11. Что бы определить какая именно подверсия «1001,» прошита в дроне можно командой
«version,» - 21, 34, 36, 45, 53 или новее.
Краткое описание команд и изменений приведено в «Памятке оператору дрона Mavic3, Mavic3 Classic,
Mavic3Pro перепрошитого на «1001,» версию»:
Русские Хакеры – Фронту,
Памятка оператору дрона Mavic3 и Mavic3 Classic, Mavic3Pro перепрошитого на «1001,» версию
В дроне зашита «1001,» версия прошивки от русских хакеров со следующими изменениями:
Команда в интерфейсе пульта дрона
Изменение в поле «Название дрона» Описание
Включение Отключение
Дрон не отсылает информацию о себе в аэроскоп: ни свое местоположение, ни
Дрон не виден на аэроскопе - -
точку дом, ни координаты оператора. Можно использовать любую версию DJI FLY и
(DRONE ID отключен)
Iphone.
«Замусоривание» аэроскопов: aeroscope_random, aeroscope_off, Дрон начнет отсылать псевдослучайную информацию в аэроскоп о местоположении
случайных дронов: либо случайные координаты, либо рисовать фигуры в форме Z
вещание поддельных aeroscope_z,
или сердца на экране аэроскопа.
координат дронов через DRONE aeroscope_heart,
При этом дрон не отсылает ни свое истинное местоположение, ни точку дом, ни
ID
координаты оператора – данные генерируются псевдослучайные.
Дрон не будет реагировать на попадание в NFZ (NoFlyZone). Телефон будет
Отключены NFZ - -
показывать, что дрон в NFZ и будет посажен, но это никак не влияет на полёт
самого дрона - нужно спокойно игнорировать эти сообщения.
Добавлен режим полёта «без gps_off, gps_on, Команда «gps_off,» активирует режим «без GPS». При этом полностью
игнорируется принимаемая информация от GPS-модуля, с вечной обманкой что
GPS»:
сигнал от нуля спутников сильный, а координаты всегда (0; 0). Это позволяет
Антиспуфинг, быстрый взлёт
сразу же после включения дрона НЕ ждать спутники, как будто он их сразу поймал,
без GPS
в координатах (0; 0) поставил Home Point и снял все ограничения на взлёт.
При этом пиктограмма спутников с количеством НОЛЬ становится
белой (на андроид-версии приложения).
Также этот режим включается переключателем на пульте в
положении «CINE».
Полёт в этом режиме осуществляется визуально - по камере.
Команда «gps_on,» позволяет летать дрону ориентируясь по GPS. Также этот
режим включается переключателем на пульте в положении «NORMAL». В этом
режиме дрон уязвим для GPS-спуфинга (подмены координат), т.е. его могут
«угнать» РЭБ.
При переключении на пульте переключателя в положение "CINE" («gps_off,») по
Переключение в режим SPORT cine_sport, cine_normal,
умолчанию дрон летает в режиме NORMAL.
при опции «gps_off,»
Если нужно летать быстрее в SPORT+ «gps_off,», то дополнительно нужно ввести
команду «cine_sport,».
Максимальная высота полёта дрона 9999 м (10 км) установлена по умолчанию (или
Максимальная высота полёта up1000, up9999,
задается командой «up9999,»), а командой «up1000,» выставляется в заводское
10км
ограничение 1000 м (1 км). Все остальные ограничения по высоте удалены.
Позволяет принудительно включать\отключать FCC и частоту 5,8ГГц.
Включение и отключение «fcc_on,» «fcc_off,»
При «fcc_on,» дополнительно используется частота 5,8 ГГц и большая мощность
FCC+5,8 ГГц
передачи данных - увеличивается дальность связи с дроном.
Отключение необходимо для дронов которых установлены усилители – что бы
работать только на 2,4ГГц.
Команда «fcc_default,» позволяет полностью отключить вмешательство в работу
радиотракта со стороны 1001,-прошивки.
Удалены ограничения по высоте/дальности в 30/50 метров от места запуска если
Удалены все ограничения - -
НЕ ВОЙТИ в учетную запись в приложении DJI FLY.
(дальность, высота) если вход
в аккаунт в приложении DJI
FLY не выполнен
AirSense — это система, которая позволяет дрону принимать сигналы, посылаемые
Автоматическое отключение - -
самолетами или вертолетами (используя протокол ADS-B), и предупреждает
системы AirSense
пользователя о наличии поблизости пилотируемого самолета или вертолета.
В случае если нижний сонар (не камеры) перекрывается подвесом или грузом – дрон
Отключение нижнего сонара на tof_on, tof_off,
не летит вниз: ни по стикам, ни по команде «посадка». В этом случае команда
случай, если дрон не будет
«tof_off,», принудительно выключит его и позволит дрону лететь вниз. Так же
снижаться из-за того, что он
выключается ИК-подсветка сонара. В этом режиме нужно садиться вручную –
будет заслонен подвесом или
штатная система не видит препятствий снизу.
грузом
Отключение бортовых огней leds_on, leds_off, Светодиоды на лучах дрона включаются командой «leds_on,» и выключаются
командой «leds_off,».
Нельзя перепрошить заводскую версию прошивки поверх «1001,», тем самым удалив
Невозможность перепрошивки - -
внесенные в нее изменения, потому что ARB=1001.
Из дрона нельзя извлечь траектории его полетов, включая точку ДОМ.
Невозможность снятия логов - -
полета
Дрон не будет автоматически пытаться сесть на последних процентах батареи.
Отключение автопосадки при bat_land_off, bat_land_on,
После команды «bat_land_off,» - будет садиться, при «bat_land_on,» - не будет
полном разряде аккумулятора
садиться.
Дрон автоматически взлетает на высоту 2000, 1000, 500, 300, 200 или 100 метров
При потере связи с пультом – lost_2000, lost_off,
вверх при потере связи с пультом. Эта функция включается командами
дрон автоматически взлетает lost_1000,
«lost_2000,», «lost_1000,», «lost_500,», «lost_300,», «lost_200,», «lost_100,»
вверх на высоту 500 (100, 200, lost_500,
соответственно (в режиме Hover).
300,1000, 2000) метров lost_300,
lost_200,
При команде «lost_compass,» дрон при потере связи с пультом поворачивается по
lost_100,
компасу в сторону откуда он прилетел (направление в котором дрон летел первые
либо полминуты после взлета и набора высоты в 50 метров), и самостоятельно
начинает лететь назад. В ATTI «lost_compass,» не работает, вместо него
улетает назад – по компасу lost_compass,
срабатывает «lost_XXX».
Команда «lost_compass,» уже активирована в дроне по умолчанию – при прошивке.
Состояние данной команды сохраняется даже после перезагрузки дрона.
Возможность запуска двигателей bad_battery, - Дрон будет взлетать с любой батареей\источником питания – принудительно
дрона с любой АКБ или же с любым обнуляются ошибки батареи
источником питания ВНИМАНИЕ! Команда НЕ ЧИНИТ батареи! Если батарея плохая - то дрон упадет!
wind_atti, wind_normal,
При достижении красного значения Если дрон ошибочно видит сильный боковой ветер и начинает ему сопротивляться –
ветра дрон сразу же принудительно улетая вбок и теряя высоту, то при достижении красного значения ветра дрон сразу
переключается в АТТИ на 8 секунд же принудительно переключается в АТТИ на 8 секунд — это дает возможность
остановить потерю высоты.
Русские Хакеры – Фронту,
ПРИЛОЖЕНИЕ
ЗАМЕЧАНИЯ по использованию команды «bad_battery,»
1.Используйте данную команду с осознанным подходом – просчитав энергетику (объем, заряд, потребление,
ветер) и примерное время полета иначе можно потерять дрон.
2. Команда «bad_battery,» позволяет снять ограничения при использовании неродных и увеличенных
батарей, но при этом появляется возможность использования ПЛОХИХ батарей. Помните, что дрон то
взлетит, но команда НЕ ЧИНИТ плохие батареи! С плохой батареей – дрон может упасть.
3.Отметим, что с неродной АКБ нельзя полностью верить штатным показаниям о состоянии батареи
(оставшийся процент заряда и времени полета) – ведь они рассчитываются корректно только для штатной
АКБ!
4. Дополнительно напомним, что при перегревах моторов – магниты в них могут размагнититься и
грузоподъемность дрона упадет, это нужно учитывать при создании увеличенных АКБ.
5. Если дрон через несколько секунд после взлета включает автопосадку то дополнительно нужно ввести
команду «bat_land_on,».
6. Если при использовании нештатной АКБ произойдет просадка по питанию (например, в момент подачи
полного газа) то дрон включит аварийную автопосадку с ошибкой из-за низкого напряжения. Это значит,
что эта АКБ не вытягивает по энергетике.
Хотя команда «bad_battery,» позволяет, но !КРАЙНЕ НЕ РЕКОМЕНДУЕТСЯ ЛЕТАТЬ без РОДНОЙ АКБ – БЕЗ
ПОКАЗАНИЙ ОСТАВШЕГОСЯ ЗАРЯДА\ВРЕМЕНИ ПОЛЕТА - ПОТЕРЯЕТЕ ДРОН!
Лучше экспериментировать с дополнительным емкостями, подключенными к родной АКБ – для контроля
уровня разряда.
Технические подробности про подключение внешнего питания (для серии Mavic3):
Напряжение батареи типа 4S используемой в Mavic3: 15-16,5Вольт.
При включении АКБ (кнопкой на ее корпусе) – она начинает подавать питание на крайние контакты(по 3
контакта с каждой стороны) и питание поступает на ESC-плату дрона. Дрон, получив питание, сразу же
включается. Если же подать внешнее питание (от других АКБ, от источника питания и т.д.) сразу на
контакты ESC-платы дрона, то дрон сразу же включается и после ввода команды «bad_battery,»
(обнуляющей ошибки АКБ) может заводить моторы и взлетать.
Контакты разъема АКБ серии Mavic3 Контакты разъема платы ESC серии Mavic3
Это вложение из поста t.me/platforma_fpv/107/1138

Прошивка дронов DJI Mavic 3 на 1001ую прошивку (v34/v36) с помощью программы "1001_v36_M3*".
БЕЗ ИСПОЛЬЗОВАНИЯ ТЕРМИНАЛА.
* Так как эта трофейная программа, по сути, копия прошивки 1001й (версии 36), то мы условно всегда будем называть её «1001_v36_M3».
Только для DJI Mavic 3
- скачать все файлы в одну папку;
- файл с расширением .zip распаковать с помощью любого архиватора (например 7zip или WinRar);
- продолжить работу с папкой "1001_v36_M3", по
.
⚠️ Перед прошивкой на компьютер заранее необходимо установить дополнительные программы и драйвера.
Установку программ и драйверов необходимо осуществлять под учетной записью
Администратора компьютера
✔️ По умолчанию мы рекомендуем устанавливать
36-ую версию
, т.к. в ней добавлена Команда
"lost"
.
📝 Посмотреть все альтернативы 1001й, если терминал с 1001й недоступен (
добавим в ближайшее время
при поддержке
#ПРОШИВКА
#DJI
#техник_бла
Это вложение из поста t.me/platforma_fpv/2/1685

ГлаZ_lite V1.7.5
ℹ️ Российское программное обеспечение, устанавливается на Андроид (телефон/планшет).
Совместим с М3, М3CLASSIC, М3PRO, AIR2S, AUTEL LITE/NANO.
## V1.7.5.
Исправлены ошибки, добавлен и улучшен функционал.
* распространяется бесплатно, для каждого устройства требуется активация ( в группах: "Гроза" и "СВОи_FPV_выZOV).
Пакет всех программ комплекса "ГроZа-GLAZ"
Устанавливается на андроид (планшет/телефон)
1. "ГроZа": работает с ПО "GLAZ" и "GLAZ lite", может использоваться как карты
2. "GLAZ Lite": для моделей DJI "М3", "М3CLASSIC", "М3PRO", "AIR2S", и "AUTEL LITE/NANO".
Устанавливается на пульт
3. "GLAZ3": для моделей DJI - "М3Т", "М3Е", "MINI 3", "MATRICE 30 / 30T", "MATRICE 300 RTK", "MATRICE 350 RTK", "MATRICE 4T/4E", для моделей AUTEL "640T V2/V3", " ALPHA" и дронов на "MAVLink".
4. "GLAZ4":
🤝 Спасибо разработчикам за содействие и красивый код.
Вместе победим!🇷🇺
😎 Будет полезно
-
(трансляция экрана пульта DJI на Windows или Android TV);
-
- совместим с М3Т, М3Е, MATRICE 30 / 30T, MATRICE 300 RTK, MATRICE 350 RTK, AUTEL 640T V2/V3, MAVLink;
-
(карты и другие возможности).
#программное_обеспечение
#Оператору_квадрокоптеров_DJI_AUTEL_FIMI
#DJI
#трансляция_экрана
#Российская_разработка
#для_android
Это вложение из поста t.me/platforma_fpv/16/1318
Гроза_2.4.0. от российского разработчика
ℹ️ Российское программное обеспечение, устанавливается на андроид (планшет/телефон) версии не ниже 9.0, взаимодействует с программами "GLAZ" и "GLAZ lite" (для операторов DJI и Autel),
в том числе "Гроза" может использоваться как карты
(российская альтернатива программе "Альпинквест").
📲
что нового в 2.4
Д
обавлен новый функционал, для карт в том числе, подробнее
❕Для каждого устройства требуется активация (доступна в группах: "Гроза" и "СВОи_FPV_выZOV").
📝
Задачи, решаемые с ПО "Гроза":
1. Карты (онлайн/оффлайн).
2. Матрица высот.
3. Целеуказание и корректировка артиллерийского огня (совместно с "Глаз", и без него).
4. Привязка снимков к карте.
5. Онлайн трекинг - отслеживание онлайн перемещения цели.
6. Входит в состав комплекса "ГроZа-GLAZ"
Пакет всех программ комплекса "ГроZа-GLAZ"
Устанавливается на андроид (планшет/телефон)
1. "ГроZа": работает с ПО "GLAZ" и "GLAZ lite", может использоваться как карты
2. "GLAZ Lite": для моделей DJI "М3", "М3CLASSIC", "М3PRO", "AIR2S", и "AUTEL LITE/NANO".
Устанавливается на пульт
3. "GLAZ3": для моделей DJI - "М3Т", "М3Е", "MINI 3", "MATRICE 30 / 30T", "MATRICE 300 RTK", "MATRICE 350 RTK", "MATRICE 4T/4E", для моделей AUTEL "640T V2/V3", " ALPHA" и дронов на "MAVLink".
4. "GLAZ4":
.
🤝 Спасибо разработчикам за содействие и красивый код.
Вместе победим!🇷🇺
#программное_обеспечение
#для_android
#карты
#Российская_разработка
#Командиру
Это вложение из поста t.me/platforma_fpv/16/1233

GLAZ_V3_release_3.6.2.3.
Новая версия.
ℹ️ Российское программное обеспечение, устанавливается на пульт DJI.
Совместим с М3*, М3Т, М3Е, MATRICE 30 / 30T, MATRICE 300 RTK, MATRICE 350 RTK, AUTEL 640T V2/V3, MAVLink.
*М3 при наличие утилиты мультибинда или COS.
## V3.6.2.3
Список обновлений
* для каждого устройства требуется активация, в группах: "Гроза" и "СВОи_FPV_выZOV.
Пакет всех программ комплекса "ГроZа-GLAZ"
Устанавливается на андроид (планшет/телефон)
1. "ГроZа": работает с ПО "GLAZ" и "GLAZ lite", может использоваться как карты
2. "GLAZ Lite": для моделей DJI "М3", "М3CLASSIC", "М3PRO", "AIR2S", и "AUTEL LITE/NANO".
Устанавливается на пульт
3. "GLAZ3": для моделей DJI - "М3Т", "М3Е", "MINI 3", "MATRICE 30 / 30T", "MATRICE 300 RTK", "MATRICE 350 RTK", "MATRICE 4T/4E", для моделей AUTEL "640T V2/V3", " ALPHA" и дронов на "MAVLink".
4. "GLAZ4":
.
🤝 Спасибо разработчикам за содействие и красивый код.
Вместе победим!🇷🇺
😎 Будет полезно
-
(трансляция экрана пульта DJI на Windows или Android TV);
-
- совместим с М3, М3CLASSIC, М3PRO, AIR2S, AUTEL LITE/NANO.
-
(карты и другие возможности).
#программное_обеспечение
#Оператору_квадрокоптеров_DJI_AUTEL_FIMI
#DJI
#трансляция_экрана
#Российская_разработка
#на_пульт
Это вложение из поста t.me/platforma_fpv/16/1294

ТРЕПЕТ 2.5.050
ℹ️ Российское программное обеспечение для оператора DJI, устанавливается:
- на пульт
RC PRO и RC PLUS
(режим "Оператор");
- на android (режим "Напарник", может использоваться как карты).
✔️ Поддерживаются модели дронов
- DJI: М3*, М3T/М3Е, Matrice 30/300/350, Matrice 4Е/4E, Matrice 4D, Mini3/3Pro, Mini4PRO**;
- Autel 4Tmax (прошивка1.8+), Autel Alpha/Titan.
* Mavic 3 в Трепете работает только на Pro пультах. RM510, RM510b и RM700 с COS или
** Требуется прошивка 1001 и пульт RM510, 510b, 700 с COS или
АКТИВАЦИЯ
- Пульт (режима "Оператор") требуется активация.
*в группе СВОи_FPV-выZOV , ветка "ПО").
- Андроид (режим "Напарник") активация не требуется.
📝
Задачи, решаемые с помощью ПО "Трепет"
с дронов по Wi-Fi.
На карте
нужно нажать на свои летающие дроны. Возможен просмотр нескольких трансляций с нескольких дронов.
- Расчет зон Френеля (радиовидимости) при измерении расстояний.
- Точка дом (Даёт возможность по маркеру лететь если заблудишься).
- ... и много других возможностей,
⚠️ Будет полезно
-
(трансляция экрана пульта DJI на Windows или Android TV)
или -
* Обязательно включать виртуализацию (аппаратное ускорение), чтобы работало плавно.
* если стандартная 64х-битная версия (выше) у вас не устанавливается - попробуйте поставить эту 32+64 битную версию.
#программное_обеспечение
#Оператору_квадрокоптеров_DJI_AUTEL_FIMI
#DJI
#Российская_разработка
#для_android
#на_пульт
#трансляция_экрана
#карты
Это вложение из поста t.me/platforma_fpv/16/1096

Утилита мультбинда для пультов
DJI RC Pro (rm510b) и DJI RC Plus (rm 700)
.
ℹ️ Возможность использовать один пульт с разными версиями дронов: Mavic 3E/3T/3M (Enterprise), Mavic 3/3 Classic/3 Cine/3 Pro, Mavic 3 Mini/3 Mini Pro, Mavic Air2S (Consumer). *
📝Шаг 1. Проверка совместимости пульта с утилитой
.
Для проверки необходимо:
📎
- распаковать архив на компьютер,
- включить и подключить пульт к компьютеру,
- запустить файл "
detect_revision.bat
" из папки
TOOLS
.
По результатам проверки:
- модель
rm510b/rm 700
;
- серийный номер
4QQZ…
или
5YSZ
.. (для rm510b) /
4LF…
(для rm 700),
- наличие установленной утилиты
cannot open
.
Если значения совпадают с
приведенными
, то утилиту можно устанавливать.
📝
Шаг 2. Установка утилиты мультибинда на пульт DJI.
Вам понадобится:
- компьютер с Windows,
- пульт DJI RC Pro (rm510b) или DJI RC Plus (rm 700),
- файлы установки утилиты,
- кабель USB (typeA/typeC).
* скачиваем утилиту на windows, далее следуем инструкции по установке.
⚠️ После распаковки не переименовывать и не переносить файлы из оригинальных папок. Установка привязана к оригинальному пути к файлам и названиям.
📝 Шаг 3. Работа.
Интерфейс "утилиты мультибинда" на пультах RC Pro версий "release 1" и "release 2" будет
, проверить
можно на первом Шаге данной инструкции.
На пультах PC Plus и PC Pro версии "release 1"
отображаются иконки с названиями типов пультов. (на фото слева) Чтобы выбрать нужную модель дрона - надо знать с каким пультом он совместим, и выбрать иконку соответствующего пульта.
RC Plus - работа с дроном Matrice 30T (Enterprise)*,
RC Enterprise - работа дронами Mavic 3E/3T/3M (Enterprise),
RC Pro - работа дронами Mavic 3/3 Classic/3 Cine/3 Pro, Mavic 3 Mini/3 Mini Pro, Mavic Air2S (Consumer).
Выбираете ярлык нужного приложения (под модель дрона), после чего пульт перезапускается уже с выбранным полетным приложением.
📎
На пультах RC Pro версии "release 2"
предлагается выбрать сразу нужную модель дрона (на фото справа), весь модельный ряд выведен на экран.
Выбираете нужную модель дрона, приступаете к работе.
📎
⚠️Чтобы не было ограничений на 5 полетов, при использовании неродного пульта, нужно:
- знать учетную запись, но которую активирован дрон, и запускать его с этой записи,
- или отвязать дрон от учетной записи (либо с оригинальной учетки, либо через программу UNBIND от РХ).
❔
.
❔ Почему не устанавливается утилита на пульт DJI RC Pro Consumer (rm510) -
#прошивка_периферийного_оборудования
#прошивка_пульта_dji
#техник_бпла
#DJI
Это вложение из поста t.me/platforma_fpv/13/942

Сравнение российского
c трофейной
для операторов квадракоптеров DJI.
*На фото пульты, на которые установлены: слева - COS, справа - утилита мультибинда.
Общая функция: мультибинд
Мультибинд - одновременная работа с дронами линейки Consumer и Enterprise.
* в данной функции есть два отличия:
1. Интерфейс: если сравнивать пульты версии "realise1", то в «COS» интерфейс более удобен:
- в «COS» - оператору достаточно выбрать модель дрона из списка (см скрин).
- в трофейной утилите выбор происходит по "Ярлыку", с названием модели пульта, с помощью которого управляется дрон.
* надо знать какой пульт управляет каким дроном (из коробки).
2. Линейка совместимого оборудования в COSe шире:
- утилита мультбинда ставится только на два пульта: RC Pro Enterprise и RC Plus;
- COS устанавливается на: Smart Controller, RC Pro, RC Pro Enterprise, RC Plus, RC, DJI Phantom 4 Pro Plus.
⏭️ На этом возможности утилиты закончились, а в COSe есть еще дополнительный функционал:
- интеграция с 1001 прошивкой (ввод команд 1001 прошивки через интерфейс COS);
- трансляция экрана пульта на ПК и мобильные устройства по USB или Wi-Fi;
- активация FCC (усиление мощности сигнала) и частоты 5,8 МГц;
- отключение RemoteID;
- отключение GPS и другие (
– это всего лишь дополнительный функционал для пульта DJI, позволяющий переключаться на режимы работы с разными версиями дронов. Только для 2х моделей пультов (RC Pro Enterprise и RC Plus). Бесплатная.
ℹ️
является полноценной прошивкой для множества моделей пультов, со своим рабочим столом и дополнительными возможностями. Требуется покупка лицензии.
✍️ Резюме
Эти программы нецелесообразно сравнивать, т.к. «Утилита мультбинда» не является аналогом "COS".
#ТЕСТЫ
Это вложение из поста t.me/platforma_fpv/232/1484

Док-стация для разблокировки и восстановления АКБ от DJI М3 (всей серии).
Прошивка русифицирована
ℹ️ Прибор объединяет в себе
, что позволяет удобно и безопасно организовать процесс работы с АКБ.
Работает без использования компьютера.
К прибору подается питание через USB-порт (можно от компьютера, можно от powerbank), вставляется АКБ и выполняются действия по
* перед использование необходимо прошить контроллер ESP8266 на
с помощью программы
.
📝 Список электронных компонентов:
1. Контроллер Wemos D1 mini PRO на ESP8266 - 1шт.
2. OLED SSD1306 I2C 128x64 - 1шт.
3. Повышающий преобразователь Step-Up DC-DC MT3608 - 1шт.
4. Резистор R100 2W - 1шт.
5. Тактовая кнопка 6х6 мм, 4-контактная - 2шт.
6. Разъем 8pin 2,5 мм Blade, для подключения АКБ - 1шт.
📝 Список 3Д-макетов корпуса:
1. Док-станция для АКБ М3 - основание.
2. Док-станция для АКБ М3 - верхняя крышка.
3. Док-станция для АКБ М3 - адаптер.
4. Док-станция для АКБ М3 - держатель кнопок.
📎
(заряд банки до 1,5В за 1 час).
#техник_бпла
#ремонт
#DJI
#АКБ
Это вложение из поста t.me/platforma_fpv/1455/1474
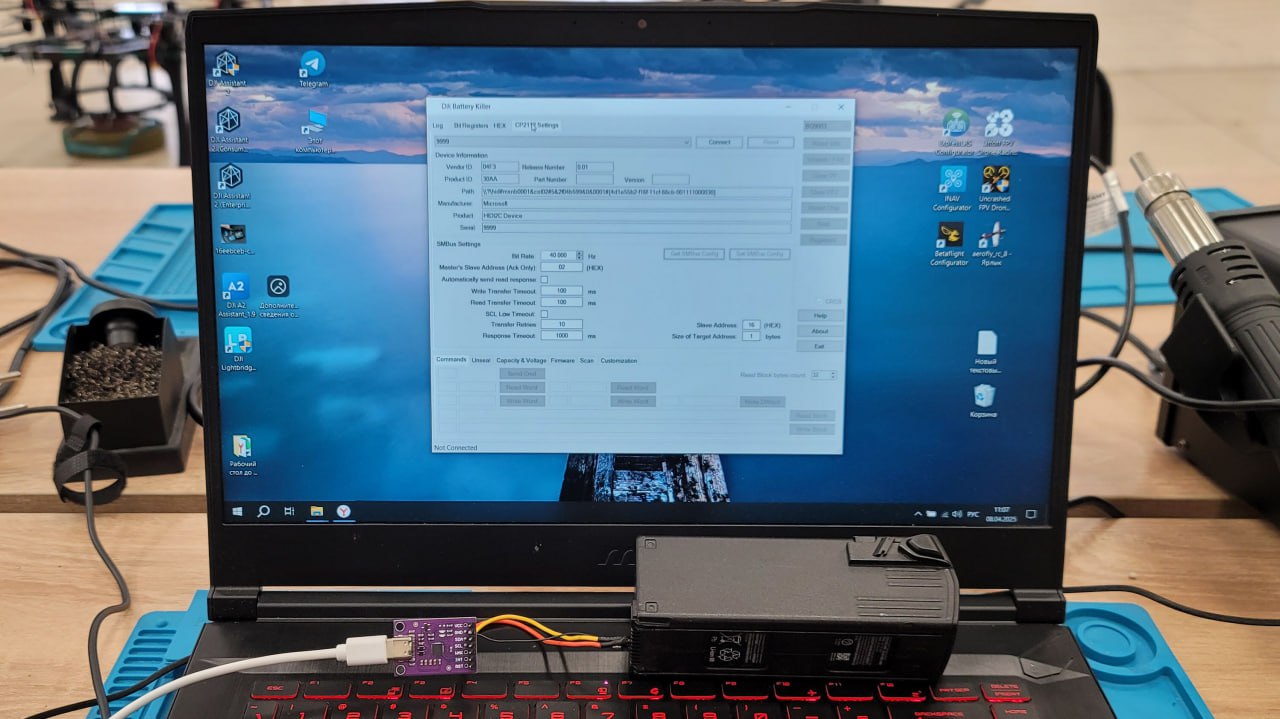
DJI Battery Killer
ℹ️ Программа для разблокировки АКБ DJI. Работает с Windows.
📝
Причины блокировки АКБ
:
- полный разряд;
- неправильное установка;
- перегрев АКБ;
- сбой прошивки или устаревшая прошивка дрона.
📎
.
📝 Инструкция:
"
⚠️ Для подключение АКБ к компьютеру Вам понадобится адаптер CP2112.
#программное_обеспечение
#для_windows
#техник_бпла
#ремонт
#DJI
#АКБ
Это вложение из поста t.me/platforma_fpv/16/1299
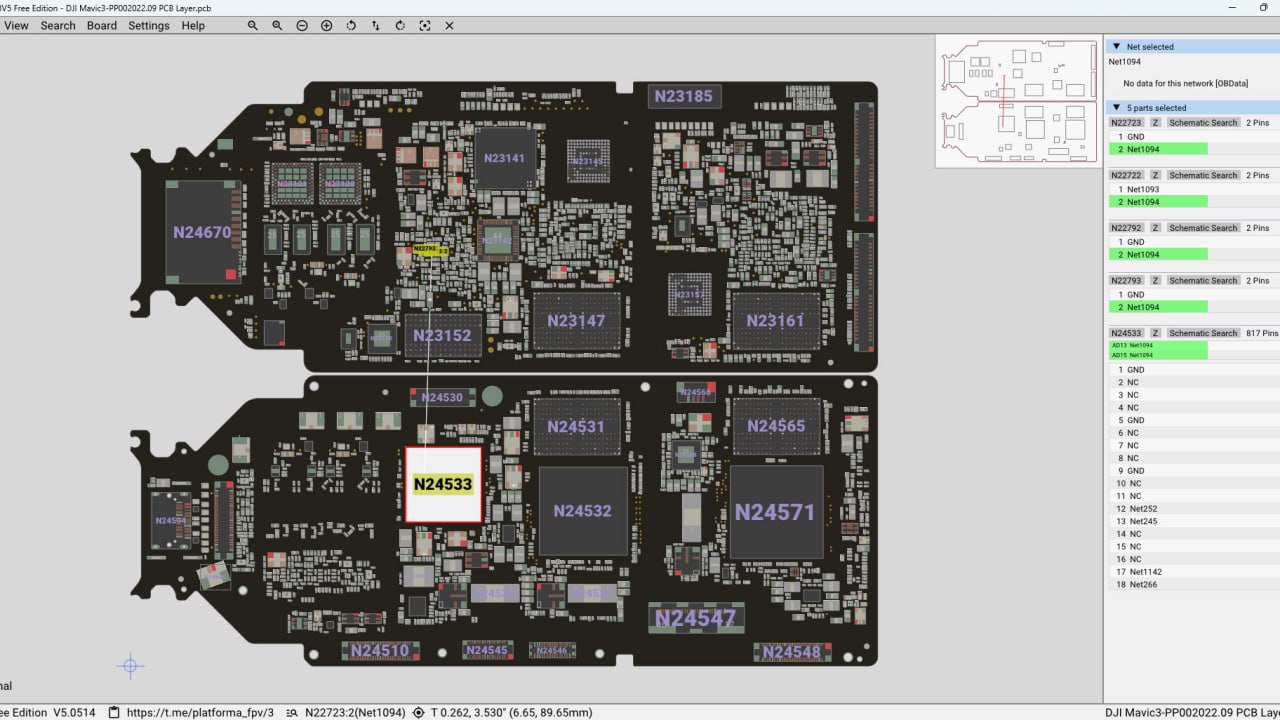
FlexBV - программа для чтения электронных схем.
Для ремонта и диагностики дронов бренда DJI.
Оптимальный набор техника DJI: программа FlexBV и набор схем дронов DJI для этой программы:
- Программа связывает обзоры плат и схемы, избавляя от необходимости вручную делать перекрёстные ссылки. Это обеспечивает более плавный процесс ремонта и позволяет сосредоточиться на поиске неисправности.
- На схеме электронной платы можно узнать серийные номера комплектующих, увидеть распиновку, отследить соединения компонентов. Удобно при ремонте электронных схем, нет необходимости прозванивать (тестировать) каждую цепь, а сразу найти ее от поврежденного компонента.
ℹ️
Схемы представлены для следующих дронов:
DJI 4P IMU, DJI Mavic Air2, DJI Mavic Air2S, DJI Mavic Air3, DJI Mavic Pro, DJI Mavic2, DJI Mavic3, DJI Mavic3 Pro, DJI Mini1, DJI Mini2, DJI Mini3, DJI Mini3 Pro, DJI Mini4 Pro.
📎
#программное_обеспечение
#для_windows
#техник_бпла
#ремонт
#DJI
Это вложение из поста t.me/platforma_fpv/16/1282
Русские Хакеры – Фронту,
Инструкция для операторов дронов с «1001,» версией прошивки
для Mavic3, Mavic3 Classic, Mavic3Pro от русских хакеров
В дроне прошита «1001,» версия прошивки. Это позволяет использовать дрон обходя некоторые ограничения, заложенные в
него заводом-изготовителем.
Изменения в прошивке:
- отключен DRONE ID и OpenDroneId;
- отключены NFZ;
- добавлен режим «Антиспуфинг, быстрый взлёт без GPS»;
- активирован FCC на самом дроне (дополнительно используется частота 5,8 ГГц и большая мощность передачи данных - увеличивается
дальность связи с дроном);
- удалены все ограничения (дальность, высота и т.д.) если вход в аккаунт приложения DJI FLYне выполнен;
- лимит по дальности установлен «без ограничений», а максимальная высота по умолчанию 10 км в независимости от местоположения на
карте (даже в зонах с ограничениями высоты);
- выключена система Airsense;
- добавлена возможность снижения при заслоненном нижнем сонаре;
- заблокирована возможность перепрошивки на заводскую версию;
Дополнительно с 34 версии:
- добавлена возможность автоматического взлёта дрона на 2000, 1000, 500, 300, 200 или 100 метров вверх при потере связи с пультом.
Это позволяет уйти из-под РЭБ (антидронового ружья), из-за которого и теряется связь;
- включен режим «посадка в руку»: дрон при посадке не отскакивает от руки, потому что выключена «умная посадка»;
- добавлена возможность управления режимом отключения автопосадки при полном разряде аккумулятора: дрон не будет автоматически
пытаться сесть на последних процентах батареи;
Дополнительно с 36 версии:
- удалена функция записи и хранения полетов – из дрона нельзя извлечь траектории полетов (кроме 3Pro);
- отключен функционал OpenDroneID – функция, рассылающая данные о дроне через WiFi;
- добавлены команды «fcc_on,», «fcc_off,» - для возможности принудительного включения\отключения FCC (отключение необходимо для
дронов у которых установлены усилители – что бы работать только на 2,4ГГц);
- что бы при нахождении в NFZ на пульте не появлялось предупреждения - исправлена отсылаемая в NFZ служебная информация с дрона
на пульт;
Дополнительно с 45 версии:
- добавлена команда «lost_compass,» - возврат дрона по компасу при потере связи с пультом: дрон поворачивается по компасу в сторону
откуда он прилетел (направление в котором дрон летел после набора высоты в 50 метров – 30 секунд), и самостоятельно начинает лететь
назад(этот режим не работает в ATTI, вместо него отрабатывает обычный «lost_XXX»;);
- дрон всегда включается в режиме «gps_off,» – (не зависит от положения выключателя на пульте);
- добавлена возможность использовать неродные батареи емкостью более 6300 мАч – убрана соответствующая проверка и ограничение;
- только для Mavic3: добавлено принудительное отключение вещания Drone ID через WiFi (OpenDroneId);
- только для MatriceM30: Улучшена защита от спуфинга в режиме без GPS – переписан код, отвечающий за обнуление координат от RTK;
- теперь при правильном вводе 1001-команды в окне «Название»(Name) дрона появится сообщение «ок,» - вместо самой команды;
Дополнительно с 53 версии:
- Добавлена команда «bad_battery,» позволяющая запускать двигатели дрона с любой АКБ или же с любым источником питания (даже при
отсутствии штатной АКБ в дроне), обнуляя ошибки батареи. Команда должна помочь в создании АКБ для долгих полетов. !Но если батарея плохая -
то дрон может упасть!;
- Добавлена команда «wind_atti,» позволяющая при достижении красного значения ветра сразу же принудительно переключать дрон в АТТИ
на 8 секунд - позволяя предотвратить потерю высоты;
- Добавлена команда «fcc_default,» к существующим командам «fcc_on,», «fcc_off,», позволяющая полностью отключить вмешательство в
работу радиотракта со стороны 1001,-прошивки;
- Переделана команда «tof_off,» - теперь она не только игнорирует показания нижнего сонара, но и выключает его ИК-подсветку.
Некоторые эти изменения можно «включить» или «выключить» вводя команду в поле «Название» в окне «Информация»
настроек приложения DJI FLY (если закрыть-открыть меню то при правильном вводе 1001-команды появится сообщение «ок,» - вместо самой команды):
1
t.me/RussianHackersChannel - Telegram канал для скачивания инструкций и новостей про наши новые разработки
версия 25.04.2025
Русские Хакеры – Фронту,
Дрон может летать «без GPS» и «с GPS»:
В прошивке «1001,» добавлена возможность полёта с полным игнорированием данных
от GPS-модуля («Антиспуфинг, быстрый взлёт без GPS»), с принудительно заданными
координатами (0; 0). В этом режиме в пиктограмме количества спутников отображается
белый НОЛЬ.
Переключение между режимами «без GPS» и «с GPS» можно произвести либо центральным
переключателем «CINE»/«NORMAL» либо командой «gps_on,» / «gps_off,».
Режим «без GPS»
«Антиспуфинг, быстрый взлёт без GPS» (положение переключателя «CINE» или команда «gps_off,») -
позволяет быстро взлетать и летать без GPS сигналов от спутников, выполняя полёт только визуально по
камере. В этом режиме недоступно все, что основано на GPS: весь полёт координаты местоположения дрона
статичные (0; 0), на карте трек не рисуется, дистанция не отображается, не работает возвращение в
Домашнюю Точку (Home Point) и полёт по заданным на карте точкам.
В этом режиме дрон становится не подвержен атаке GPS-спуфинга (подмене координат, т.е. «угону»).
Если РЭБ подделывает сигнал от GPS спутников:
• сдвигает в аэропорт;
• меняет текущее местоположение;
• меняет высоту или скорость движения,
то дрон никак на это не реагирует – он не видит реальные данные от GPS.
В этом режиме позиционирование и стабилизацию дрон выполняет только по нижним датчикам, не
используя GPS, поэтому чем выше высота полёта – тем хуже он будет держать себя и сноситься ветром.
Зачастую на высотах более 200 метров он будет переходить в ATTI режим – зависит от поверхности снизу.
Также, находясь в данном режиме можно летать в SPORT-режиме, для этого нужно ввести команду
«cine_sport,». Это позволит лететь с большей скоростью, углами наклона и игнорированием препятствий.
Для переключения в нормальный режим полёта (но по-прежнему без спутников) нужно ввести команду
«cine_normal,».
Русские Хакеры – Фронту,
Режим «с GPS»
«Заводской режим с позиционированием по GPS» (положение переключателя «NORMAL», «SPORT» или
команда «gps_on,») - штатный полёт с использованием координат GPS спутников. Отображаются корректные
координаты и трек полёта дрона, работает возврат в Домашнюю Точку (Home Point).
В этом режиме дрон может быть уязвим для GPS-спуфинга (подмены координат), т.е. его могут
«угнать». В отличии от заводской в «1001,» высота жестко прибита к барометру, то есть к спуфингу высоты
дрон невосприимчив.
Также, находясь в данном режиме можно летать в SPORT-режиме, для этого нужно перевести
центральный переключатель в «SPORT». Это позволит лететь с большей скоростью, углами наклона и
игнорированием препятствий. Для переключения в нормальный режим полёта со спутниками нужно снова
вернуть переключатель в положение «NORMAL».
Во время выполнения полёта можно переключать режимы «с GPS» или «без GPS». В режиме «с GPS»
при наличии спутников домашняя точка обновится (либо можно обновить её вручную) и будет доступен
возврат домой.
Режим «без GPS»/ «с GPS» переключается центральным переключателем на пульте. Но при включении дрон
всегда включается в режиме «gps_off,» – (не зависит от положения выключателя на пульте).
Во всех режимах максимальные радиус и высота полёта, выставленные на пульте игнорируются и
дрон ведет себя так, как если бы на пульте задано "без ограничений".
Ограничение по высоте полёта по умолчанию выставлено в 10 км (установить 1 км можно командой
«up1000,»).
Положение центрального переключателя в «CINE» переопределено - фактически он включает режим
NORMAL+ «gps_off,». Если нужно SPORT+ «gps_off,», то дополнительно нужно ввести команду «cine_sport,».
Поведение дрона при потере связи с пультом: полет «назад по компасу» либо автоматический взлёт вверх
Добавлена возможность автоматического возврата по компасу «назад» или взлёта дрона на высоты
2000, 1000, 500, 300, 200 или 100 метров при потере связи с пультом. Это позволяет уйти из-под РЭБ
(антидронового ружья), из-за которого и теряется связь с пультом. Эти функции включаются командами
«lost_compass,», «lost_2000,», «lost_1000,», «lost_500,», «lost_300,», «lost_200,», «lost_100,» соответственно
и действует только при режиме «Зависание» («Hover») в настройке меню «Потеря сигнала» («Signal Lost»).
Состояние команды запоминается после перезагрузки дрона.
При команде «lost_compass,» дрон при потере связи с пультом поворачивается по компасу в сторону
откуда он прилетел (направление в котором дрон летел первые 30 секунд после набора высоты в 50 метров),
и самостоятельно начинает лететь назад, набрав предварительно высоту в 150 метров (если он ниже 150м,
если выше – то на этой же высоте сразу). Этот режим не работает в ATTI, вместо него отрабатывает
«lost_XXX»(введенный до команды «lost_compass,» - он также запоминается).
Как происходит запись направления для полета «назад» командой «lost_compass,»: когда дрон после взлета
преодолел 50 метровую высоту – запускается процесс записи направления, который длится 30 секунд. В этот момент
на экране пульта спутники начинают отсчитывать 30 секунд (30-29-28-…-3-2-1) – это сделано для наглядности
отсчета оператором. В это время нужно лететь строго в сторону БЗ (при этом направление записывается вдоль
продольной оси корпуса дрона). Также для процесса «записи» дрон должен двигаться (иметь скорость), а не «висеть»
- запись только при движении, если скорость нулевая – направление не учитывается. После завершения отсчета дрон
запомнит усредненное направление «назад» по компасу, которое было в течение этих 30 секунд и по которому он
будет возвращаться в случае потери связи (в течение текущего полета - до выключения моторов).
При команде «lost_compass,» дрон использует только компас, и ориентируется только по «азимуту»,
(не используя GPS), поэтому важно не ожидать от него поведения аналогичного режиму RTH (основанном на
GPS) – он не вернется в точку взлета, а лишь полетит в направлении, обратном записанному вначале. Время
обратного полета равно общему времени текущего полета (с момента включения моторов).
Русские Хакеры – Фронту,
Дрон самостоятельно летит до восстановления связи с пультом (и еще через 6 секунд восстановится
управление стиками). При восстановлении управления дрон начнет возвращаться на ту высоту, которая была
в момент потери связи, то есть ВНИЗ. Для восстановления управления и остановки движения дрона вниз
необходимо нажать стик «ВВЕРХ» - перехватив управление.
Для выключения возможности автоматического взлёта вверх\назад при потере связи с пультом
(чтобы дрон просто «зависал» при потере сигнала) нужно ввести команду «lost_off,».
Команда «lost_compass,» активирована сразу же, по умолчанию - при прошивке(а до него вводится lost_500,).
Возможность остановить потерю высоты дрона при сильном боковом ветре
Существует редко проявляющаяся проблема при использовании «1001,»-прошивки в режиме «без GPS»
(особенно на моделях 3Т\Е) – дрон ошибочно видит сильный боковой ветер и начинает ему сопротивляться
– улетая вбок и теряя высоту. Эта компенсация ветру происходит автоматически и практически не
компенсируется стиками пульта.
Для решения этой проблемы создана команда «wind_atti,» - после ее ввода дрон, при достижении красного
значения ветра (для Mavic3 - выше 16м\с), сразу же принудительно переключается в АТТИ на 8 секунд.
Это отключает самостоятельный полет дрона и дает возможность оператору вырулить вручную – вернув
ему управление.
Данная команда вводится при каждом включении дрона (не сохраняется после перезагрузки!)
Возможность запуска двигателей дрона с любой АКБ или же с любым источником питания
(обнуление ошибок батареи)
Команда «bad_battery,» дает возможность запускать двигатели при наличии питания на дроне (даже при
отсутствии штатной АКБ в дроне): с любой АКБ или же с любым источником питания соответствующего
напряжения (фактически команда обнуляет ошибки, связанные с батареей). Можно летать с батареей
любого объема\производителя и даже на проводе с земли.
ВНИМАНИЕ! Команда «bad_battery,» НЕ ЧИНИТ батареи! Если батарея плохая - то дрон может упасть!
Команда «bad_battery,» вводится при каждом включении дрона (не сохраняется после перезагрузки!) и в
пиктограмме количества спутников периодически отображается число «88» — это индикатор того, что
дрон игнорирует ошибки батареи. «88» выбрано для наглядности, это сокращение от «Bad_Battery,» -
первые две буквы этой команды - BB. Эта индикация напоминает пилоту, что дрон летит с неродной
батареей и в этом случае вся ответственность за контролем параметров батареи – на нем (ведь батарея
– «основа» дрона для нахождения в воздухе).
Технические подробности по использованию команды – см Приложение «ЗАМЕЧАНИЯ по использованию
команды «bad_battery,»»
Примечания
1) Каждая команда заканчивается «запятой», не забывайте про это при вводе;
2) Чтобы не запутаться рекомендуется выполнять весь полёт в одном режиме: либо «без GPS»,
либо «с GPS»;
3) Если полёт начался в режиме «без GPS», то при переключении в режим «с GPS» дрон снова
становится уязвим для GPS-спуфинга;
4) Если в полёте по GPS началось странное поведение дрона, то лучше сразу перейти в режим
«Антиспуфинг, быстрый взлёт без GPS» (положение переключателя «CINE» или команда «gps_off,»);
5) Если в полёте в режиме «Антиспуфинг, быстрый взлёт без GPS» («CINE» или «gps_off,») был ещё
и режим ATTI, то при переключении в «GPS» («NORMAL» или «gps_on,») можно увидеть "ошибку полётного
контроллера". Данная ошибка не мешает текущему полёту;
6) Для выхода из ATTI режима рекомендуется снизить высоту(менее 10м), чтобы снова "зацепиться"
за землю нижними камерами;
Русские Хакеры – Фронту,
7) Переключать режим нужно при включенном дроне и включенном пульте. Если при включении пульта
и дрона значение переключателя не соответствует отображаемому на экране режиму в приложении DJI FLY,
то нужно переключиться на пульте в другой режим и через пару секунд вернуть переключатель обратно в
нужное положение. С 45 версии дрон всегда включается в режиме «gps_off,» – не зависимо от положения выключателя на пульте;
8) в последних версиях DJI FLY (например 1.10.6) отсутствует кнопка выбора двухполосного
радиоканала во вкладке «Передача». При включении дрона с активированной командой «fcc_on,» радиообмен
производится в двух диапазонах, если кнопки 2,4 и 5,8 не нажимать. Но если выбрать кнопкой хоть один
из этих диапазонов, то вернуться в двухполосный режим уже не получится без перезагрузки.
9) Если в дроне уже установлен усилитель (бустер) на 2,4 ГГц, то разово нужно ввести команду
«fcc_off,» - что бы дрон использовал только частоту 2,4ГГц. Иначе дрон будет работать в двух частотах,
и при переходе на 5,8ГГц радиотракт будет работать без усилителя. Команда применится после
перезагрузки дрона и пульта;
10) После перезагрузки дрона значения команд «leds_off(on),», «cine_normal(sport),», «lost_X00,»,
«lost_off,», «bat_land_off(on),», «fcc_on(off),» запоминаются, а состояния остальных введённых команд не
сохраняются;
11) Изменять настройки «посадка в руку»\ «Precission Landing» и «Отключение автопосадки при
полном разряде аккумулятора» можно также используя программу DroneHacks;
12) Если 3Т\3Е сваливается в АТТI (в режиме «gps_off,»), проверьте что бы в настройках было
включено «Visual Рositioning»(Визуальное позиционирование).
13) Определить, что дрон прошит на "1001," прошивку можно визуально: в отличие от заводского,
прошитый «1001,» при включении питания в пиктограмме с количеством спутников отсчитывает:
99,88,77,66,55,44,33,22,11. Что бы определить какая именно подверсия «1001,» прошита в дроне можно командой
«version,» - 21, 34, 36, 45, 53 или новее.
Краткое описание команд и изменений приведено в «Памятке оператору дрона Mavic3, Mavic3 Classic,
Mavic3Pro перепрошитого на «1001,» версию»:
Русские Хакеры – Фронту,
Памятка оператору дрона Mavic3 и Mavic3 Classic, Mavic3Pro перепрошитого на «1001,» версию
В дроне зашита «1001,» версия прошивки от русских хакеров со следующими изменениями:
Команда в интерфейсе пульта дрона
Изменение в поле «Название дрона» Описание
Включение Отключение
Дрон не отсылает информацию о себе в аэроскоп: ни свое местоположение, ни
Дрон не виден на аэроскопе - -
точку дом, ни координаты оператора. Можно использовать любую версию DJI FLY и
(DRONE ID отключен)
Iphone.
«Замусоривание» аэроскопов: aeroscope_random, aeroscope_off, Дрон начнет отсылать псевдослучайную информацию в аэроскоп о местоположении
случайных дронов: либо случайные координаты, либо рисовать фигуры в форме Z
вещание поддельных aeroscope_z,
или сердца на экране аэроскопа.
координат дронов через DRONE aeroscope_heart,
При этом дрон не отсылает ни свое истинное местоположение, ни точку дом, ни
ID
координаты оператора – данные генерируются псевдослучайные.
Дрон не будет реагировать на попадание в NFZ (NoFlyZone). Телефон будет
Отключены NFZ - -
показывать, что дрон в NFZ и будет посажен, но это никак не влияет на полёт
самого дрона - нужно спокойно игнорировать эти сообщения.
Добавлен режим полёта «без gps_off, gps_on, Команда «gps_off,» активирует режим «без GPS». При этом полностью
игнорируется принимаемая информация от GPS-модуля, с вечной обманкой что
GPS»:
сигнал от нуля спутников сильный, а координаты всегда (0; 0). Это позволяет
Антиспуфинг, быстрый взлёт
сразу же после включения дрона НЕ ждать спутники, как будто он их сразу поймал,
без GPS
в координатах (0; 0) поставил Home Point и снял все ограничения на взлёт.
При этом пиктограмма спутников с количеством НОЛЬ становится
белой (на андроид-версии приложения).
Также этот режим включается переключателем на пульте в
положении «CINE».
Полёт в этом режиме осуществляется визуально - по камере.
Команда «gps_on,» позволяет летать дрону ориентируясь по GPS. Также этот
режим включается переключателем на пульте в положении «NORMAL». В этом
режиме дрон уязвим для GPS-спуфинга (подмены координат), т.е. его могут
«угнать» РЭБ.
При переключении на пульте переключателя в положение "CINE" («gps_off,») по
Переключение в режим SPORT cine_sport, cine_normal,
умолчанию дрон летает в режиме NORMAL.
при опции «gps_off,»
Если нужно летать быстрее в SPORT+ «gps_off,», то дополнительно нужно ввести
команду «cine_sport,».
Максимальная высота полёта дрона 9999 м (10 км) установлена по умолчанию (или
Максимальная высота полёта up1000, up9999,
задается командой «up9999,»), а командой «up1000,» выставляется в заводское
10км
ограничение 1000 м (1 км). Все остальные ограничения по высоте удалены.
Позволяет принудительно включать\отключать FCC и частоту 5,8ГГц.
Включение и отключение «fcc_on,» «fcc_off,»
При «fcc_on,» дополнительно используется частота 5,8 ГГц и большая мощность
FCC+5,8 ГГц
передачи данных - увеличивается дальность связи с дроном.
Отключение необходимо для дронов которых установлены усилители – что бы
работать только на 2,4ГГц.
Команда «fcc_default,» позволяет полностью отключить вмешательство в работу
радиотракта со стороны 1001,-прошивки.
Удалены ограничения по высоте/дальности в 30/50 метров от места запуска если
Удалены все ограничения - -
НЕ ВОЙТИ в учетную запись в приложении DJI FLY.
(дальность, высота) если вход
в аккаунт в приложении DJI
FLY не выполнен
AirSense — это система, которая позволяет дрону принимать сигналы, посылаемые
Автоматическое отключение - -
самолетами или вертолетами (используя протокол ADS-B), и предупреждает
системы AirSense
пользователя о наличии поблизости пилотируемого самолета или вертолета.
В случае если нижний сонар (не камеры) перекрывается подвесом или грузом – дрон
Отключение нижнего сонара на tof_on, tof_off,
не летит вниз: ни по стикам, ни по команде «посадка». В этом случае команда
случай, если дрон не будет
«tof_off,», принудительно выключит его и позволит дрону лететь вниз. Так же
снижаться из-за того, что он
выключается ИК-подсветка сонара. В этом режиме нужно садиться вручную –
будет заслонен подвесом или
штатная система не видит препятствий снизу.
грузом
Отключение бортовых огней leds_on, leds_off, Светодиоды на лучах дрона включаются командой «leds_on,» и выключаются
командой «leds_off,».
Нельзя перепрошить заводскую версию прошивки поверх «1001,», тем самым удалив
Невозможность перепрошивки - -
внесенные в нее изменения, потому что ARB=1001.
Из дрона нельзя извлечь траектории его полетов, включая точку ДОМ.
Невозможность снятия логов - -
полета
Дрон не будет автоматически пытаться сесть на последних процентах батареи.
Отключение автопосадки при bat_land_off, bat_land_on,
После команды «bat_land_off,» - будет садиться, при «bat_land_on,» - не будет
полном разряде аккумулятора
садиться.
Дрон автоматически взлетает на высоту 2000, 1000, 500, 300, 200 или 100 метров
При потере связи с пультом – lost_2000, lost_off,
вверх при потере связи с пультом. Эта функция включается командами
дрон автоматически взлетает lost_1000,
«lost_2000,», «lost_1000,», «lost_500,», «lost_300,», «lost_200,», «lost_100,»
вверх на высоту 500 (100, 200, lost_500,
соответственно (в режиме Hover).
300,1000, 2000) метров lost_300,
lost_200,
При команде «lost_compass,» дрон при потере связи с пультом поворачивается по
lost_100,
компасу в сторону откуда он прилетел (направление в котором дрон летел первые
либо полминуты после взлета и набора высоты в 50 метров), и самостоятельно
начинает лететь назад. В ATTI «lost_compass,» не работает, вместо него
улетает назад – по компасу lost_compass,
срабатывает «lost_XXX».
Команда «lost_compass,» уже активирована в дроне по умолчанию – при прошивке.
Состояние данной команды сохраняется даже после перезагрузки дрона.
Возможность запуска двигателей bad_battery, - Дрон будет взлетать с любой батареей\источником питания – принудительно
дрона с любой АКБ или же с любым обнуляются ошибки батареи
источником питания ВНИМАНИЕ! Команда НЕ ЧИНИТ батареи! Если батарея плохая - то дрон упадет!
wind_atti, wind_normal,
При достижении красного значения Если дрон ошибочно видит сильный боковой ветер и начинает ему сопротивляться –
ветра дрон сразу же принудительно улетая вбок и теряя высоту, то при достижении красного значения ветра дрон сразу
переключается в АТТИ на 8 секунд же принудительно переключается в АТТИ на 8 секунд — это дает возможность
остановить потерю высоты.
Русские Хакеры – Фронту,
ПРИЛОЖЕНИЕ
ЗАМЕЧАНИЯ по использованию команды «bad_battery,»
1.Используйте данную команду с осознанным подходом – просчитав энергетику (объем, заряд, потребление,
ветер) и примерное время полета иначе можно потерять дрон.
2. Команда «bad_battery,» позволяет снять ограничения при использовании неродных и увеличенных
батарей, но при этом появляется возможность использования ПЛОХИХ батарей. Помните, что дрон то
взлетит, но команда НЕ ЧИНИТ плохие батареи! С плохой батареей – дрон может упасть.
3.Отметим, что с неродной АКБ нельзя полностью верить штатным показаниям о состоянии батареи
(оставшийся процент заряда и времени полета) – ведь они рассчитываются корректно только для штатной
АКБ!
4. Дополнительно напомним, что при перегревах моторов – магниты в них могут размагнититься и
грузоподъемность дрона упадет, это нужно учитывать при создании увеличенных АКБ.
5. Если дрон через несколько секунд после взлета включает автопосадку то дополнительно нужно ввести
команду «bat_land_on,».
6. Если при использовании нештатной АКБ произойдет просадка по питанию (например, в момент подачи
полного газа) то дрон включит аварийную автопосадку с ошибкой из-за низкого напряжения. Это значит,
что эта АКБ не вытягивает по энергетике.
Хотя команда «bad_battery,» позволяет, но !КРАЙНЕ НЕ РЕКОМЕНДУЕТСЯ ЛЕТАТЬ без РОДНОЙ АКБ – БЕЗ
ПОКАЗАНИЙ ОСТАВШЕГОСЯ ЗАРЯДА\ВРЕМЕНИ ПОЛЕТА - ПОТЕРЯЕТЕ ДРОН!
Лучше экспериментировать с дополнительным емкостями, подключенными к родной АКБ – для контроля
уровня разряда.
Технические подробности про подключение внешнего питания (для серии Mavic3):
Напряжение батареи типа 4S используемой в Mavic3: 15-16,5Вольт.
При включении АКБ (кнопкой на ее корпусе) – она начинает подавать питание на крайние контакты(по 3
контакта с каждой стороны) и питание поступает на ESC-плату дрона. Дрон, получив питание, сразу же
включается. Если же подать внешнее питание (от других АКБ, от источника питания и т.д.) сразу на
контакты ESC-платы дрона, то дрон сразу же включается и после ввода команды «bad_battery,»
(обнуляющей ошибки АКБ) может заводить моторы и взлетать.
Контакты разъема АКБ серии Mavic3 Контакты разъема платы ESC серии Mavic3
Инструкция для операторов дронов с «1001,» версией прошивки
для Mavic3, Mavic3 Classic, Mavic3Pro от русских хакеров
В дроне прошита «1001,» версия прошивки. Это позволяет использовать дрон обходя некоторые ограничения, заложенные в
него заводом-изготовителем.
Изменения в прошивке:
- отключен DRONE ID и OpenDroneId;
- отключены NFZ;
- добавлен режим «Антиспуфинг, быстрый взлёт без GPS»;
- активирован FCC на самом дроне (дополнительно используется частота 5,8 ГГц и большая мощность передачи данных - увеличивается
дальность связи с дроном);
- удалены все ограничения (дальность, высота и т.д.) если вход в аккаунт приложения DJI FLYне выполнен;
- лимит по дальности установлен «без ограничений», а максимальная высота по умолчанию 10 км в независимости от местоположения на
карте (даже в зонах с ограничениями высоты);
- выключена система Airsense;
- добавлена возможность снижения при заслоненном нижнем сонаре;
- заблокирована возможность перепрошивки на заводскую версию;
Дополнительно с 34 версии:
- добавлена возможность автоматического взлёта дрона на 2000, 1000, 500, 300, 200 или 100 метров вверх при потере связи с пультом.
Это позволяет уйти из-под РЭБ (антидронового ружья), из-за которого и теряется связь;
- включен режим «посадка в руку»: дрон при посадке не отскакивает от руки, потому что выключена «умная посадка»;
- добавлена возможность управления режимом отключения автопосадки при полном разряде аккумулятора: дрон не будет автоматически
пытаться сесть на последних процентах батареи;
Дополнительно с 36 версии:
- удалена функция записи и хранения полетов – из дрона нельзя извлечь траектории полетов (кроме 3Pro);
- отключен функционал OpenDroneID – функция, рассылающая данные о дроне через WiFi;
- добавлены команды «fcc_on,», «fcc_off,» - для возможности принудительного включения\отключения FCC (отключение необходимо для
дронов у которых установлены усилители – что бы работать только на 2,4ГГц);
- что бы при нахождении в NFZ на пульте не появлялось предупреждения - исправлена отсылаемая в NFZ служебная информация с дрона
на пульт;
Дополнительно с 45 версии:
- добавлена команда «lost_compass,» - возврат дрона по компасу при потере связи с пультом: дрон поворачивается по компасу в сторону
откуда он прилетел (направление в котором дрон летел после набора высоты в 50 метров – 30 секунд), и самостоятельно начинает лететь
назад(этот режим не работает в ATTI, вместо него отрабатывает обычный «lost_XXX»;);
- дрон всегда включается в режиме «gps_off,» – (не зависит от положения выключателя на пульте);
- добавлена возможность использовать неродные батареи емкостью более 6300 мАч – убрана соответствующая проверка и ограничение;
- только для Mavic3: добавлено принудительное отключение вещания Drone ID через WiFi (OpenDroneId);
- только для MatriceM30: Улучшена защита от спуфинга в режиме без GPS – переписан код, отвечающий за обнуление координат от RTK;
- теперь при правильном вводе 1001-команды в окне «Название»(Name) дрона появится сообщение «ок,» - вместо самой команды;
Дополнительно с 53 версии:
- Добавлена команда «bad_battery,» позволяющая запускать двигатели дрона с любой АКБ или же с любым источником питания (даже при
отсутствии штатной АКБ в дроне), обнуляя ошибки батареи. Команда должна помочь в создании АКБ для долгих полетов. !Но если батарея плохая -
то дрон может упасть!;
- Добавлена команда «wind_atti,» позволяющая при достижении красного значения ветра сразу же принудительно переключать дрон в АТТИ
на 8 секунд - позволяя предотвратить потерю высоты;
- Добавлена команда «fcc_default,» к существующим командам «fcc_on,», «fcc_off,», позволяющая полностью отключить вмешательство в
работу радиотракта со стороны 1001,-прошивки;
- Переделана команда «tof_off,» - теперь она не только игнорирует показания нижнего сонара, но и выключает его ИК-подсветку.
Некоторые эти изменения можно «включить» или «выключить» вводя команду в поле «Название» в окне «Информация»
настроек приложения DJI FLY (если закрыть-открыть меню то при правильном вводе 1001-команды появится сообщение «ок,» - вместо самой команды):
1
t.me/RussianHackersChannel - Telegram канал для скачивания инструкций и новостей про наши новые разработки
версия 25.04.2025
Русские Хакеры – Фронту,
Дрон может летать «без GPS» и «с GPS»:
В прошивке «1001,» добавлена возможность полёта с полным игнорированием данных
от GPS-модуля («Антиспуфинг, быстрый взлёт без GPS»), с принудительно заданными
координатами (0; 0). В этом режиме в пиктограмме количества спутников отображается
белый НОЛЬ.
Переключение между режимами «без GPS» и «с GPS» можно произвести либо центральным
переключателем «CINE»/«NORMAL» либо командой «gps_on,» / «gps_off,».
Режим «без GPS»
«Антиспуфинг, быстрый взлёт без GPS» (положение переключателя «CINE» или команда «gps_off,») -
позволяет быстро взлетать и летать без GPS сигналов от спутников, выполняя полёт только визуально по
камере. В этом режиме недоступно все, что основано на GPS: весь полёт координаты местоположения дрона
статичные (0; 0), на карте трек не рисуется, дистанция не отображается, не работает возвращение в
Домашнюю Точку (Home Point) и полёт по заданным на карте точкам.
В этом режиме дрон становится не подвержен атаке GPS-спуфинга (подмене координат, т.е. «угону»).
Если РЭБ подделывает сигнал от GPS спутников:
• сдвигает в аэропорт;
• меняет текущее местоположение;
• меняет высоту или скорость движения,
то дрон никак на это не реагирует – он не видит реальные данные от GPS.
В этом режиме позиционирование и стабилизацию дрон выполняет только по нижним датчикам, не
используя GPS, поэтому чем выше высота полёта – тем хуже он будет держать себя и сноситься ветром.
Зачастую на высотах более 200 метров он будет переходить в ATTI режим – зависит от поверхности снизу.
Также, находясь в данном режиме можно летать в SPORT-режиме, для этого нужно ввести команду
«cine_sport,». Это позволит лететь с большей скоростью, углами наклона и игнорированием препятствий.
Для переключения в нормальный режим полёта (но по-прежнему без спутников) нужно ввести команду
«cine_normal,».
Русские Хакеры – Фронту,
Режим «с GPS»
«Заводской режим с позиционированием по GPS» (положение переключателя «NORMAL», «SPORT» или
команда «gps_on,») - штатный полёт с использованием координат GPS спутников. Отображаются корректные
координаты и трек полёта дрона, работает возврат в Домашнюю Точку (Home Point).
В этом режиме дрон может быть уязвим для GPS-спуфинга (подмены координат), т.е. его могут
«угнать». В отличии от заводской в «1001,» высота жестко прибита к барометру, то есть к спуфингу высоты
дрон невосприимчив.
Также, находясь в данном режиме можно летать в SPORT-режиме, для этого нужно перевести
центральный переключатель в «SPORT». Это позволит лететь с большей скоростью, углами наклона и
игнорированием препятствий. Для переключения в нормальный режим полёта со спутниками нужно снова
вернуть переключатель в положение «NORMAL».
Во время выполнения полёта можно переключать режимы «с GPS» или «без GPS». В режиме «с GPS»
при наличии спутников домашняя точка обновится (либо можно обновить её вручную) и будет доступен
возврат домой.
Режим «без GPS»/ «с GPS» переключается центральным переключателем на пульте. Но при включении дрон
всегда включается в режиме «gps_off,» – (не зависит от положения выключателя на пульте).
Во всех режимах максимальные радиус и высота полёта, выставленные на пульте игнорируются и
дрон ведет себя так, как если бы на пульте задано "без ограничений".
Ограничение по высоте полёта по умолчанию выставлено в 10 км (установить 1 км можно командой
«up1000,»).
Положение центрального переключателя в «CINE» переопределено - фактически он включает режим
NORMAL+ «gps_off,». Если нужно SPORT+ «gps_off,», то дополнительно нужно ввести команду «cine_sport,».
Поведение дрона при потере связи с пультом: полет «назад по компасу» либо автоматический взлёт вверх
Добавлена возможность автоматического возврата по компасу «назад» или взлёта дрона на высоты
2000, 1000, 500, 300, 200 или 100 метров при потере связи с пультом. Это позволяет уйти из-под РЭБ
(антидронового ружья), из-за которого и теряется связь с пультом. Эти функции включаются командами
«lost_compass,», «lost_2000,», «lost_1000,», «lost_500,», «lost_300,», «lost_200,», «lost_100,» соответственно
и действует только при режиме «Зависание» («Hover») в настройке меню «Потеря сигнала» («Signal Lost»).
Состояние команды запоминается после перезагрузки дрона.
При команде «lost_compass,» дрон при потере связи с пультом поворачивается по компасу в сторону
откуда он прилетел (направление в котором дрон летел первые 30 секунд после набора высоты в 50 метров),
и самостоятельно начинает лететь назад, набрав предварительно высоту в 150 метров (если он ниже 150м,
если выше – то на этой же высоте сразу). Этот режим не работает в ATTI, вместо него отрабатывает
«lost_XXX»(введенный до команды «lost_compass,» - он также запоминается).
Как происходит запись направления для полета «назад» командой «lost_compass,»: когда дрон после взлета
преодолел 50 метровую высоту – запускается процесс записи направления, который длится 30 секунд. В этот момент
на экране пульта спутники начинают отсчитывать 30 секунд (30-29-28-…-3-2-1) – это сделано для наглядности
отсчета оператором. В это время нужно лететь строго в сторону БЗ (при этом направление записывается вдоль
продольной оси корпуса дрона). Также для процесса «записи» дрон должен двигаться (иметь скорость), а не «висеть»
- запись только при движении, если скорость нулевая – направление не учитывается. После завершения отсчета дрон
запомнит усредненное направление «назад» по компасу, которое было в течение этих 30 секунд и по которому он
будет возвращаться в случае потери связи (в течение текущего полета - до выключения моторов).
При команде «lost_compass,» дрон использует только компас, и ориентируется только по «азимуту»,
(не используя GPS), поэтому важно не ожидать от него поведения аналогичного режиму RTH (основанном на
GPS) – он не вернется в точку взлета, а лишь полетит в направлении, обратном записанному вначале. Время
обратного полета равно общему времени текущего полета (с момента включения моторов).
Русские Хакеры – Фронту,
Дрон самостоятельно летит до восстановления связи с пультом (и еще через 6 секунд восстановится
управление стиками). При восстановлении управления дрон начнет возвращаться на ту высоту, которая была
в момент потери связи, то есть ВНИЗ. Для восстановления управления и остановки движения дрона вниз
необходимо нажать стик «ВВЕРХ» - перехватив управление.
Для выключения возможности автоматического взлёта вверх\назад при потере связи с пультом
(чтобы дрон просто «зависал» при потере сигнала) нужно ввести команду «lost_off,».
Команда «lost_compass,» активирована сразу же, по умолчанию - при прошивке(а до него вводится lost_500,).
Возможность остановить потерю высоты дрона при сильном боковом ветре
Существует редко проявляющаяся проблема при использовании «1001,»-прошивки в режиме «без GPS»
(особенно на моделях 3Т\Е) – дрон ошибочно видит сильный боковой ветер и начинает ему сопротивляться
– улетая вбок и теряя высоту. Эта компенсация ветру происходит автоматически и практически не
компенсируется стиками пульта.
Для решения этой проблемы создана команда «wind_atti,» - после ее ввода дрон, при достижении красного
значения ветра (для Mavic3 - выше 16м\с), сразу же принудительно переключается в АТТИ на 8 секунд.
Это отключает самостоятельный полет дрона и дает возможность оператору вырулить вручную – вернув
ему управление.
Данная команда вводится при каждом включении дрона (не сохраняется после перезагрузки!)
Возможность запуска двигателей дрона с любой АКБ или же с любым источником питания
(обнуление ошибок батареи)
Команда «bad_battery,» дает возможность запускать двигатели при наличии питания на дроне (даже при
отсутствии штатной АКБ в дроне): с любой АКБ или же с любым источником питания соответствующего
напряжения (фактически команда обнуляет ошибки, связанные с батареей). Можно летать с батареей
любого объема\производителя и даже на проводе с земли.
ВНИМАНИЕ! Команда «bad_battery,» НЕ ЧИНИТ батареи! Если батарея плохая - то дрон может упасть!
Команда «bad_battery,» вводится при каждом включении дрона (не сохраняется после перезагрузки!) и в
пиктограмме количества спутников периодически отображается число «88» — это индикатор того, что
дрон игнорирует ошибки батареи. «88» выбрано для наглядности, это сокращение от «Bad_Battery,» -
первые две буквы этой команды - BB. Эта индикация напоминает пилоту, что дрон летит с неродной
батареей и в этом случае вся ответственность за контролем параметров батареи – на нем (ведь батарея
– «основа» дрона для нахождения в воздухе).
Технические подробности по использованию команды – см Приложение «ЗАМЕЧАНИЯ по использованию
команды «bad_battery,»»
Примечания
1) Каждая команда заканчивается «запятой», не забывайте про это при вводе;
2) Чтобы не запутаться рекомендуется выполнять весь полёт в одном режиме: либо «без GPS»,
либо «с GPS»;
3) Если полёт начался в режиме «без GPS», то при переключении в режим «с GPS» дрон снова
становится уязвим для GPS-спуфинга;
4) Если в полёте по GPS началось странное поведение дрона, то лучше сразу перейти в режим
«Антиспуфинг, быстрый взлёт без GPS» (положение переключателя «CINE» или команда «gps_off,»);
5) Если в полёте в режиме «Антиспуфинг, быстрый взлёт без GPS» («CINE» или «gps_off,») был ещё
и режим ATTI, то при переключении в «GPS» («NORMAL» или «gps_on,») можно увидеть "ошибку полётного
контроллера". Данная ошибка не мешает текущему полёту;
6) Для выхода из ATTI режима рекомендуется снизить высоту(менее 10м), чтобы снова "зацепиться"
за землю нижними камерами;
Русские Хакеры – Фронту,
7) Переключать режим нужно при включенном дроне и включенном пульте. Если при включении пульта
и дрона значение переключателя не соответствует отображаемому на экране режиму в приложении DJI FLY,
то нужно переключиться на пульте в другой режим и через пару секунд вернуть переключатель обратно в
нужное положение. С 45 версии дрон всегда включается в режиме «gps_off,» – не зависимо от положения выключателя на пульте;
8) в последних версиях DJI FLY (например 1.10.6) отсутствует кнопка выбора двухполосного
радиоканала во вкладке «Передача». При включении дрона с активированной командой «fcc_on,» радиообмен
производится в двух диапазонах, если кнопки 2,4 и 5,8 не нажимать. Но если выбрать кнопкой хоть один
из этих диапазонов, то вернуться в двухполосный режим уже не получится без перезагрузки.
9) Если в дроне уже установлен усилитель (бустер) на 2,4 ГГц, то разово нужно ввести команду
«fcc_off,» - что бы дрон использовал только частоту 2,4ГГц. Иначе дрон будет работать в двух частотах,
и при переходе на 5,8ГГц радиотракт будет работать без усилителя. Команда применится после
перезагрузки дрона и пульта;
10) После перезагрузки дрона значения команд «leds_off(on),», «cine_normal(sport),», «lost_X00,»,
«lost_off,», «bat_land_off(on),», «fcc_on(off),» запоминаются, а состояния остальных введённых команд не
сохраняются;
11) Изменять настройки «посадка в руку»\ «Precission Landing» и «Отключение автопосадки при
полном разряде аккумулятора» можно также используя программу DroneHacks;
12) Если 3Т\3Е сваливается в АТТI (в режиме «gps_off,»), проверьте что бы в настройках было
включено «Visual Рositioning»(Визуальное позиционирование).
13) Определить, что дрон прошит на "1001," прошивку можно визуально: в отличие от заводского,
прошитый «1001,» при включении питания в пиктограмме с количеством спутников отсчитывает:
99,88,77,66,55,44,33,22,11. Что бы определить какая именно подверсия «1001,» прошита в дроне можно командой
«version,» - 21, 34, 36, 45, 53 или новее.
Краткое описание команд и изменений приведено в «Памятке оператору дрона Mavic3, Mavic3 Classic,
Mavic3Pro перепрошитого на «1001,» версию»:
Русские Хакеры – Фронту,
Памятка оператору дрона Mavic3 и Mavic3 Classic, Mavic3Pro перепрошитого на «1001,» версию
В дроне зашита «1001,» версия прошивки от русских хакеров со следующими изменениями:
Команда в интерфейсе пульта дрона
Изменение в поле «Название дрона» Описание
Включение Отключение
Дрон не отсылает информацию о себе в аэроскоп: ни свое местоположение, ни
Дрон не виден на аэроскопе - -
точку дом, ни координаты оператора. Можно использовать любую версию DJI FLY и
(DRONE ID отключен)
Iphone.
«Замусоривание» аэроскопов: aeroscope_random, aeroscope_off, Дрон начнет отсылать псевдослучайную информацию в аэроскоп о местоположении
случайных дронов: либо случайные координаты, либо рисовать фигуры в форме Z
вещание поддельных aeroscope_z,
или сердца на экране аэроскопа.
координат дронов через DRONE aeroscope_heart,
При этом дрон не отсылает ни свое истинное местоположение, ни точку дом, ни
ID
координаты оператора – данные генерируются псевдослучайные.
Дрон не будет реагировать на попадание в NFZ (NoFlyZone). Телефон будет
Отключены NFZ - -
показывать, что дрон в NFZ и будет посажен, но это никак не влияет на полёт
самого дрона - нужно спокойно игнорировать эти сообщения.
Добавлен режим полёта «без gps_off, gps_on, Команда «gps_off,» активирует режим «без GPS». При этом полностью
игнорируется принимаемая информация от GPS-модуля, с вечной обманкой что
GPS»:
сигнал от нуля спутников сильный, а координаты всегда (0; 0). Это позволяет
Антиспуфинг, быстрый взлёт
сразу же после включения дрона НЕ ждать спутники, как будто он их сразу поймал,
без GPS
в координатах (0; 0) поставил Home Point и снял все ограничения на взлёт.
При этом пиктограмма спутников с количеством НОЛЬ становится
белой (на андроид-версии приложения).
Также этот режим включается переключателем на пульте в
положении «CINE».
Полёт в этом режиме осуществляется визуально - по камере.
Команда «gps_on,» позволяет летать дрону ориентируясь по GPS. Также этот
режим включается переключателем на пульте в положении «NORMAL». В этом
режиме дрон уязвим для GPS-спуфинга (подмены координат), т.е. его могут
«угнать» РЭБ.
При переключении на пульте переключателя в положение "CINE" («gps_off,») по
Переключение в режим SPORT cine_sport, cine_normal,
умолчанию дрон летает в режиме NORMAL.
при опции «gps_off,»
Если нужно летать быстрее в SPORT+ «gps_off,», то дополнительно нужно ввести
команду «cine_sport,».
Максимальная высота полёта дрона 9999 м (10 км) установлена по умолчанию (или
Максимальная высота полёта up1000, up9999,
задается командой «up9999,»), а командой «up1000,» выставляется в заводское
10км
ограничение 1000 м (1 км). Все остальные ограничения по высоте удалены.
Позволяет принудительно включать\отключать FCC и частоту 5,8ГГц.
Включение и отключение «fcc_on,» «fcc_off,»
При «fcc_on,» дополнительно используется частота 5,8 ГГц и большая мощность
FCC+5,8 ГГц
передачи данных - увеличивается дальность связи с дроном.
Отключение необходимо для дронов которых установлены усилители – что бы
работать только на 2,4ГГц.
Команда «fcc_default,» позволяет полностью отключить вмешательство в работу
радиотракта со стороны 1001,-прошивки.
Удалены ограничения по высоте/дальности в 30/50 метров от места запуска если
Удалены все ограничения - -
НЕ ВОЙТИ в учетную запись в приложении DJI FLY.
(дальность, высота) если вход
в аккаунт в приложении DJI
FLY не выполнен
AirSense — это система, которая позволяет дрону принимать сигналы, посылаемые
Автоматическое отключение - -
самолетами или вертолетами (используя протокол ADS-B), и предупреждает
системы AirSense
пользователя о наличии поблизости пилотируемого самолета или вертолета.
В случае если нижний сонар (не камеры) перекрывается подвесом или грузом – дрон
Отключение нижнего сонара на tof_on, tof_off,
не летит вниз: ни по стикам, ни по команде «посадка». В этом случае команда
случай, если дрон не будет
«tof_off,», принудительно выключит его и позволит дрону лететь вниз. Так же
снижаться из-за того, что он
выключается ИК-подсветка сонара. В этом режиме нужно садиться вручную –
будет заслонен подвесом или
штатная система не видит препятствий снизу.
грузом
Отключение бортовых огней leds_on, leds_off, Светодиоды на лучах дрона включаются командой «leds_on,» и выключаются
командой «leds_off,».
Нельзя перепрошить заводскую версию прошивки поверх «1001,», тем самым удалив
Невозможность перепрошивки - -
внесенные в нее изменения, потому что ARB=1001.
Из дрона нельзя извлечь траектории его полетов, включая точку ДОМ.
Невозможность снятия логов - -
полета
Дрон не будет автоматически пытаться сесть на последних процентах батареи.
Отключение автопосадки при bat_land_off, bat_land_on,
После команды «bat_land_off,» - будет садиться, при «bat_land_on,» - не будет
полном разряде аккумулятора
садиться.
Дрон автоматически взлетает на высоту 2000, 1000, 500, 300, 200 или 100 метров
При потере связи с пультом – lost_2000, lost_off,
вверх при потере связи с пультом. Эта функция включается командами
дрон автоматически взлетает lost_1000,
«lost_2000,», «lost_1000,», «lost_500,», «lost_300,», «lost_200,», «lost_100,»
вверх на высоту 500 (100, 200, lost_500,
соответственно (в режиме Hover).
300,1000, 2000) метров lost_300,
lost_200,
При команде «lost_compass,» дрон при потере связи с пультом поворачивается по
lost_100,
компасу в сторону откуда он прилетел (направление в котором дрон летел первые
либо полминуты после взлета и набора высоты в 50 метров), и самостоятельно
начинает лететь назад. В ATTI «lost_compass,» не работает, вместо него
улетает назад – по компасу lost_compass,
срабатывает «lost_XXX».
Команда «lost_compass,» уже активирована в дроне по умолчанию – при прошивке.
Состояние данной команды сохраняется даже после перезагрузки дрона.
Возможность запуска двигателей bad_battery, - Дрон будет взлетать с любой батареей\источником питания – принудительно
дрона с любой АКБ или же с любым обнуляются ошибки батареи
источником питания ВНИМАНИЕ! Команда НЕ ЧИНИТ батареи! Если батарея плохая - то дрон упадет!
wind_atti, wind_normal,
При достижении красного значения Если дрон ошибочно видит сильный боковой ветер и начинает ему сопротивляться –
ветра дрон сразу же принудительно улетая вбок и теряя высоту, то при достижении красного значения ветра дрон сразу
переключается в АТТИ на 8 секунд же принудительно переключается в АТТИ на 8 секунд — это дает возможность
остановить потерю высоты.
Русские Хакеры – Фронту,
ПРИЛОЖЕНИЕ
ЗАМЕЧАНИЯ по использованию команды «bad_battery,»
1.Используйте данную команду с осознанным подходом – просчитав энергетику (объем, заряд, потребление,
ветер) и примерное время полета иначе можно потерять дрон.
2. Команда «bad_battery,» позволяет снять ограничения при использовании неродных и увеличенных
батарей, но при этом появляется возможность использования ПЛОХИХ батарей. Помните, что дрон то
взлетит, но команда НЕ ЧИНИТ плохие батареи! С плохой батареей – дрон может упасть.
3.Отметим, что с неродной АКБ нельзя полностью верить штатным показаниям о состоянии батареи
(оставшийся процент заряда и времени полета) – ведь они рассчитываются корректно только для штатной
АКБ!
4. Дополнительно напомним, что при перегревах моторов – магниты в них могут размагнититься и
грузоподъемность дрона упадет, это нужно учитывать при создании увеличенных АКБ.
5. Если дрон через несколько секунд после взлета включает автопосадку то дополнительно нужно ввести
команду «bat_land_on,».
6. Если при использовании нештатной АКБ произойдет просадка по питанию (например, в момент подачи
полного газа) то дрон включит аварийную автопосадку с ошибкой из-за низкого напряжения. Это значит,
что эта АКБ не вытягивает по энергетике.
Хотя команда «bad_battery,» позволяет, но !КРАЙНЕ НЕ РЕКОМЕНДУЕТСЯ ЛЕТАТЬ без РОДНОЙ АКБ – БЕЗ
ПОКАЗАНИЙ ОСТАВШЕГОСЯ ЗАРЯДА\ВРЕМЕНИ ПОЛЕТА - ПОТЕРЯЕТЕ ДРОН!
Лучше экспериментировать с дополнительным емкостями, подключенными к родной АКБ – для контроля
уровня разряда.
Технические подробности про подключение внешнего питания (для серии Mavic3):
Напряжение батареи типа 4S используемой в Mavic3: 15-16,5Вольт.
При включении АКБ (кнопкой на ее корпусе) – она начинает подавать питание на крайние контакты(по 3
контакта с каждой стороны) и питание поступает на ESC-плату дрона. Дрон, получив питание, сразу же
включается. Если же подать внешнее питание (от других АКБ, от источника питания и т.д.) сразу на
контакты ESC-платы дрона, то дрон сразу же включается и после ввода команды «bad_battery,»
(обнуляющей ошибки АКБ) может заводить моторы и взлетать.
Контакты разъема АКБ серии Mavic3 Контакты разъема платы ESC серии Mavic3
Это вложение из поста t.me/platforma_fpv/107/1138

ПРОШИВКА И ПО ДЛЯ М3 (МАВИК_3)
оптимальный набор_2025
1001" от Русских Хакеров (на дрон)
.
Прошивка позволяет использовать дрон обходя некоторые ограничения, заложенные в него заводом-изготовителем, например:
- отключены DRONE ID, OpenDroneId, NFZ;
- режим «Антиспуфинг, быстрый взлёт без GPS», активирован FCC на самом дроне;
- сняты все лимиты, есть возможность запускать двигатели дрона с любой АКБ (даже при отсутствии штатной АКБ в дроне), игнорируя ошибки батареи;
- и многое другое.
📝
❔ Где прошить на 1001
.
ℹ️ Если 1001 прошивка через терминал недоступна
- альтернатива тут -
GLAZ_Lite" (на андроид: телефон или планшет, с которого управляется М3)
.
Российское программное обеспечение, которое, работая в комплексе с приложением «Гроза» формирует полноценную систему геоинформационной поддержки.
📎
на андроид, с которого управляется М3.
📎
на андроид (планшет или телефон).
* требуется активация: в группах разработчиков, СВОи_FPV_vyZOV, через терминал 1001.
✔️Если у Вас пульт RC Pro Enterprise и RC Plus с установленной утилитой мультибинда или COS, доступна установка на пульт: GLAZ_3 и/или ТРЕПЕТ.
"GLAZ_3" и/или "ТРЕПЕТ" - российские программы, схожего назначения, отличаются функциональным набором, интерфейсом и возможностями.
Если не определились, забирайте оба:
📎 "
" на пульт.
📎 "
" на пульт - режим Оператор, на андроид - режим Напарник.
* требуется активация: в группах разработчиков, СВОи_FPV_vyZOV, через терминал 1001.
COS" или "Утилита мультибинда" (на пульт)
.
- Утилита открывает дополнительный функционал для пульта DJI, позволяющий переключаться на режимы работы с разными версиями дронов. Только для 2х моделей пультов (RC Pro Enterprise и RC Plus). Бесплатная.
- COS является полноценной прошивкой для множества моделей пультов, со своим рабочим столом и дополнительными возможностями. Требуется покупка лицензии.
Отвязка от пульта (аккаунта)
Unbind от "Русских Хакеров" отвязывает дрон от пульта (от учетки).
Где отвязать -> там же где ставят 1001.
🛠
Для техников DJI
DJI Battery Killer" и/или "Док-станция
".
Нужны для восстановления и разблокировки АКБ для DJI Mavic серии 3.
" - программа для разблокировки АКБ DJI.
FlexBV
".
Программа для чтения электронных схем + набор электронных схем для дронов DJI. Для диагностики и ремонта.
Программа связывает обзоры плат и схемы, а также с ее помощью можно узнать серийные номера комплектующих, увидеть распиновку, отследить соединения компонентов.
📎
Так же, мы рекомендуем для М3
:
- проверять и облетывать дрон после прошивки и/или ремонта;
- распечатывать и вкладывать в кейс
для операторов М3;
- доукомплектовывать запасными АКБ и хабом для мультизарядки (если в наборе нет);
- доукомплектовывать запасными пропеллерами (купить можно на али или озоне).
Лайфхак
Цена на отдельно тушку М3 ниже, доукомплектовать её пультом б/у и акб, скорее всего, будет выгоднее, чем покупать новый М3 комбо.
#Оператору_квадрокоптеров_DJI_AUTEL_FIMI
#DJI
#ПРОШИВКА
#Техник_бпла
#ремонт_DJI
#DJI
Это вложение из поста t.me/platforma_fpv/2/1493
ПРОШИВКА И ПО ДЛЯ М3Т
оптимальный набор_2025
1001" от Русских Хакеров (на дрон)
.
Прошивка позволяет использовать дрон обходя некоторые ограничения, заложенные в него заводом-изготовителем, например:
- отключены DRONE ID, OpenDroneId, NFZ;
- добавлен режим «Антиспуфинг, быстрый взлёт без GPS», активирован FCC на самом дроне;
- сняты все лимиты и ограничения по дальности и высоте (до10 км) вне зависимости от местоположения на карте;
- добавлена возможность автоматического взлёта дрона на 2000, 1000, 500, 300, 200 или 100 метров вверх при потере связи с пультом (уход из под РЭБ);
- удалена функция записи и хранения полетов – из дрона нельзя извлечь траектории полетов;
- возврат дрона по компасу при потере связи с пультом;
- возможность использовать неродные батареи емкостью более 6300 мАч;
- возможность запускать двигатели дрона с любой АКБ (даже при отсутствии штатной АКБ в дроне), игнорируя ошибки батареи;
- принудительное переключение дрона в режим ATTI на 8 секунд при достижении «красного» (критического) значения ветра, позволяет предотвратить потерю высоты; - и другие возможности.
📝
❔ Где прошить на 1001
GLAZ_3" и/или "ТРЕПЕТ"(на пульт)
.
Российское программное обеспечение схожего назначения, отличаются функциональным набором, интерфейсом и возможностями. Если не определились, забирайте оба:
" на пульт.
📎 "
" на пульт - режим Оператор, на андроид - режим Напарник.
* требуется активация: в группах разработчиков, СВОи_FPV_vyZOV, через терминал 1001.
COS или Утилита мультибинда (на пульт)
.
- Утилита открывает дополнительный функционал для пульта DJI, позволяющий переключаться на режимы работы с разными версиями дронов. Только для 2х моделей пультов (RC Pro Enterprise и RC Plus). Бесплатная.
- COS является полноценной прошивкой для множества моделей пультов, со своим рабочим столом и дополнительными возможностями. Требуется покупка лицензии.
Отвязка от пульта (аккаунта)
"Unbind" от "Русских Хакеров" отвязывает дрон от пульта (от учетки).
Где отвязать -> там же где ставят "1001".
🛠
Для техников DJI
DJI Battery Killer" и/или "Док-станция
".
Нужны для восстановления и разблокировки АКБ для DJI Mavic серии 3.
" - программа для разблокировки АКБ DJI.
FlexBV
".
Программа для чтения электронных схем + набор электронных схем для дронов DJI. Для диагностики и ремонта.
Программа связывает обзоры плат и схемы, а также с ее помощью можно узнать серийные номера комплектующих, увидеть распиновку, отследить соединения компонентов.
📎
Так же, мы рекомендуем для М3Т
:
- проверять и облетывать дрон после прошивки и/или ремонта;
- распечатывать и вкладывать в кейс
для операторов;
- доукомплектовывать М3Т запасными АКБ и хабом для мультизарядки (если в наборе нет);
- доукомплектовывать запасными пропеллерами (купить можно на али или озоне).
Лайфхак
Цена на М3Т
версии China
ниже, но для такой версии уже обязательно нужно устанавливать 1001-ю прошивку и проводить UNBIND.
#Оператору_квадрокоптеров_DJI_AUTEL_FIMI
#DJI
#ПРОШИВКА
#Техник_бпла
#ремонт_DJI
#DJI
Это вложение из поста t.me/platforma_fpv/2/1490
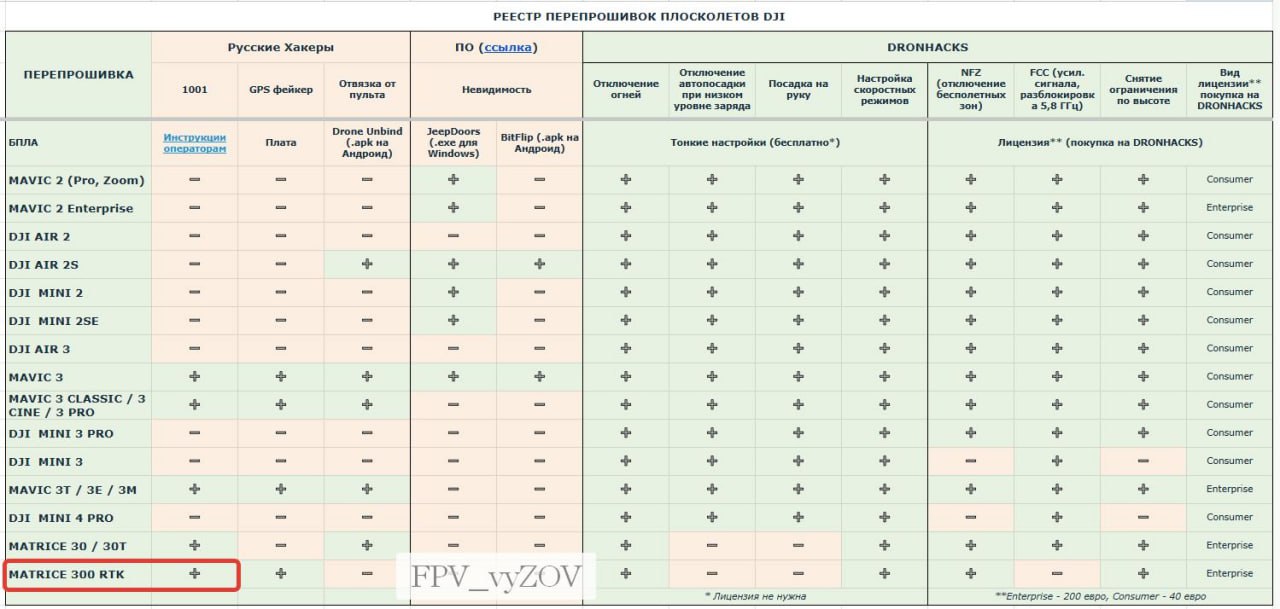
РЕЕСТР ПРОШИВОК ДЛЯ КВАДРОКОПТЕРОВ DJI
ℹ️ Какой дрон, на что и с помощью какого инструмента можно перепрошить.
* обновляется регулярно.
Добавлена прошивка для DJI MATRICE 4Т/4Е.
Прошивка, в реестре:
- "1001" от Русских Хакеров (
)
ℹ️ Если 1001 прошивка через терминал недоступна
- альтернатива тут -
- "Drone Unbind" от РХ - для отвязки дрона от пульта
- "
(.apk на Андроид)
-
(.exe для Windows)
- "DRONHACKS" - запасной вариант (если не накатывается 1001).
ℹ️ К
акие есть еще варианты прошивки:
📝
Непроверенная внешняя ссылка
DronHacks
DronHacks
(по VPN)
1. Тонкие настройки:
- Отключение огней
- Отключение автопосадки при низком уровне заряда
- Посадка на руку
- Изменение характеристик режима СПОРТ и другие
2. Лицензия:
- Отключение бесполетных зон
- Включение FCC
- Отключение ограничения по высоте
📝
(.exe для Windows) - отключение DroneID на Мавик 2 и Мавик 3 (с официальной прошивкой до 1000).
Работает на Windows.
📝
(.apk на Андроид) - отключение DroneID, отключение огней на Мавик 3 с официальной прошивкой до 700.
Работает на Android.
Коллеги, если Вам есть что дополнить, пишите в личку или в группе СВОи_FPV_выZOV.
#Оператору_квадрокоптеров_DJI_AUTEL_FIMI
#DJI
#ПРОШИВКА
#Техник_бпла
#ремонт_DJI
#DJI
Это вложение из поста t.me/platforma_fpv/2/1319
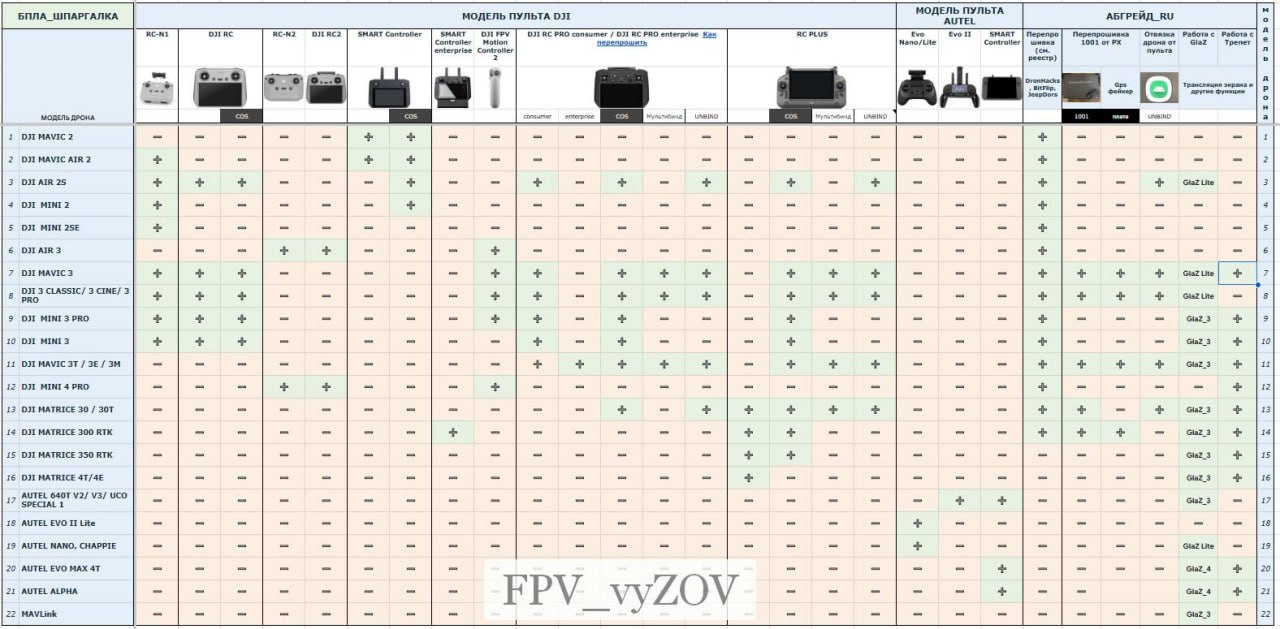
БПЛА_ШПАРГАЛКА_2025.
Операторам DJI и Autel.
⚡️ Правки
- Добавлены к линейке дронов: "AUTEL ALPHA", "DJI MATRICE 4T/4E";
- Добавлены совместимость утилиты мультибинда,;
- Добавлена совместимость ПО Трепет с М3*, mini 4 Pro, Matrice 4T/4E, Autel 4T;
* Mavic 3 в Трепете работает только на Pro пультах. RM510, RM510b и RM700 с COS3 или утилитой мультибинда;
- Добавлена 1001-ая для DJI MATRICE 300 RTK;
- Незначительные правки.
Шпаргалка - подсказка
КАКИЕ ДРОНЫ:
- с какими пультами совместимы;
- отвязываются от пульта;
- перепрошиваются (возможность и программа);
- совместимы с пакетом программ
➡️ КАКИЕ ПУЛЬТЫ
- перепрошиваются;
- с какими моделями дронов совместимы;
- с какими ПО совместимы.
ℹ️
В ШПАРГАЛКЕ
:
- прошивка пульта
);
- совместимость с COS (
);
- совместимость утилиты мультибинда (
).
- возможности UNBIND (программа от РХ для отвязки дрона от пульта).
- прошивка через DronHacks, BitFlip, JeepDors (см. в
).
- 1001 прошивка на какие дроны -
.
- совместимость с ПО "
".
- совместимость с ПО "
ℹ️ ПРО ПРОШИВКИ И МАВИКИ
ℹ️ УПРАВЛЕНИЕ
Коллеги, если Вам есть что дополнить, пишите в личку или в группе СВОи_FPV_выZOV.
#Оператору_квадрокоптеров_DJI_AUTEL_FIMI
#DJI
#РЕМОНТ_МАСТЕРСКАЯ
#Техник_бпла
#ремонт_DJI
#DJI
#AUTEL
#dji_шпаргалка
#autel_шпаргалка
Это вложение из поста t.me/platforma_fpv/637/1317
#ПРОШИВКА
ПРОШИВКА ДЛЯ FPV ДРОНА
Приемник-передатчик (RX-TX)
Не умею отображать вложенные ссылки на топики
модифицированная прошивка для передатчика и приемника ELRS (управление)
📝
Полетный контроллер
- российская прошивка для пк - защита от дизарма
📝
Не умею отображать вложенные ссылки на топики
украинская прошивка для пк
Переключение видеоканалов
- переключение видеоканалов в полете с пульта
📝
Не умею отображать вложенные ссылки на топики
- переключение видеоканалов в полете с пульта
📖
: файлы для загрузки, инструкция
Регулятор оборотов
- прошивка для 32-битного регуляторов оборотов моторов (ESC)
Аппаратура управления
Инструкции по прошивке, для техника FPV
ПРОШИВКА ДЛЯ DJI
1001 прошивка на текущий момент через терминал недоступна
- альтернатива тут -
Это вложение из поста t.me/platforma_fpv/2/202
ПРОШИВКА И ПО ДЛЯ М3 (МАВИК_3)
оптимальный набор_2025
1001" от Русских Хакеров (на дрон)
.
Прошивка позволяет использовать дрон обходя некоторые ограничения, заложенные в него заводом-изготовителем, например:
- отключены DRONE ID, OpenDroneId, NFZ;
- режим «Антиспуфинг, быстрый взлёт без GPS», активирован FCC на самом дроне;
- сняты все лимиты, есть возможность запускать двигатели дрона с любой АКБ (даже при отсутствии штатной АКБ в дроне), игнорируя ошибки батареи;
- и многое другое.
📝
❔ Где прошить на 1001
.
ℹ️ Если 1001 прошивка через терминал недоступна
- альтернатива тут -
GLAZ_Lite" (на андроид: телефон или планшет, с которого управляется М3)
.
Российское программное обеспечение, которое, работая в комплексе с приложением «Гроза» формирует полноценную систему геоинформационной поддержки.
📎
на андроид, с которого управляется М3.
📎
на андроид (планшет или телефон).
* требуется активация: в группах разработчиков, СВОи_FPV_vyZOV, через терминал 1001.
✔️Если у Вас пульт RC Pro Enterprise и RC Plus с установленной утилитой мультибинда или COS, доступна установка на пульт: GLAZ_3 и/или ТРЕПЕТ.
"GLAZ_3" и/или "ТРЕПЕТ" - российские программы, схожего назначения, отличаются функциональным набором, интерфейсом и возможностями.
Если не определились, забирайте оба:
📎 "
" на пульт.
📎 "
" на пульт - режим Оператор, на андроид - режим Напарник.
* требуется активация: в группах разработчиков, СВОи_FPV_vyZOV, через терминал 1001.
COS" или "Утилита мультибинда" (на пульт)
.
- Утилита открывает дополнительный функционал для пульта DJI, позволяющий переключаться на режимы работы с разными версиями дронов. Только для 2х моделей пультов (RC Pro Enterprise и RC Plus). Бесплатная.
- COS является полноценной прошивкой для множества моделей пультов, со своим рабочим столом и дополнительными возможностями. Требуется покупка лицензии.
Отвязка от пульта (аккаунта)
Unbind от "Русских Хакеров" отвязывает дрон от пульта (от учетки).
Где отвязать -> там же где ставят 1001.
🛠
Для техников DJI
DJI Battery Killer" и/или "Док-станция
".
Нужны для восстановления и разблокировки АКБ для DJI Mavic серии 3.
" - программа для разблокировки АКБ DJI.
FlexBV
".
Программа для чтения электронных схем + набор электронных схем для дронов DJI. Для диагностики и ремонта.
Программа связывает обзоры плат и схемы, а также с ее помощью можно узнать серийные номера комплектующих, увидеть распиновку, отследить соединения компонентов.
📎
Так же, мы рекомендуем для М3
:
- проверять и облетывать дрон после прошивки и/или ремонта;
- распечатывать и вкладывать в кейс
для операторов М3;
- доукомплектовывать запасными АКБ и хабом для мультизарядки (если в наборе нет);
- доукомплектовывать запасными пропеллерами (купить можно на али или озоне).
Лайфхак
Цена на отдельно тушку М3 ниже, доукомплектовать её пультом б/у и акб, скорее всего, будет выгоднее, чем покупать новый М3 комбо.
#Оператору_квадрокоптеров_DJI_AUTEL_FIMI
#DJI
#ПРОШИВКА
#Техник_бпла
#ремонт_DJI
#DJI
Веб-страница создана автоматически на основе поста пользователя ПЛАТФОРМА_FPV